Les drivers moteurs à base de circuits TB6600 sont intéressants car ils peuvent monter jusqu’à 40V et 4A. De fait, il peuvent gérer un grand nombre de moteurs bipolaires. Le prix d’un driver est actuellement de moins de 10 euros sur ebay ou aliexpress.
Les drivers TB6600 existent sous différents packaging suivant la puissance et la tension maximale qu’ils peuvent délivrer. Toutefois, les connections sont les mêmes.
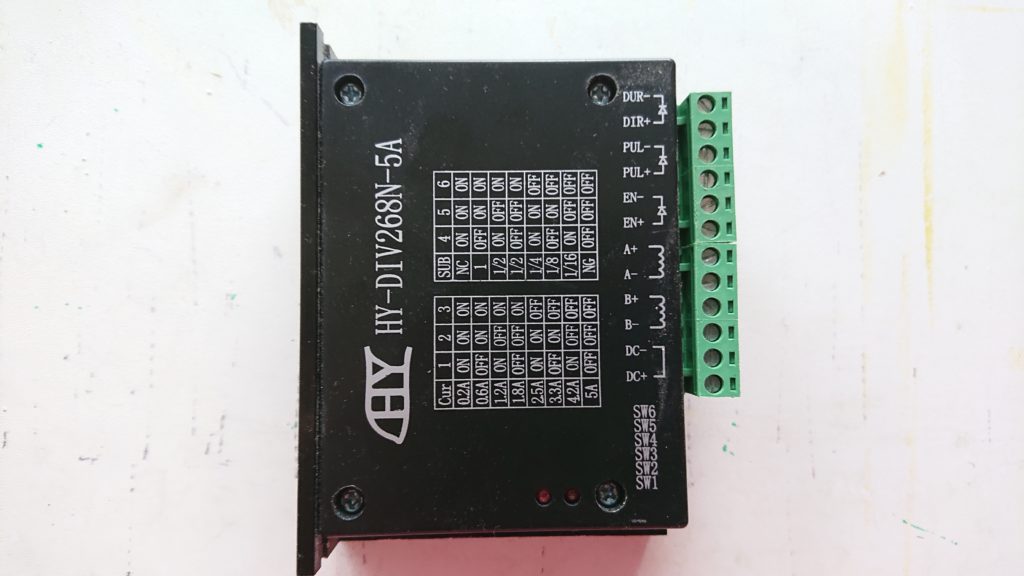
Du coté moteur, on a :
- VCC (DC+), GND (DC-) qui sont à relier à l’alimentation des moteurs.
- A+,A- et B+,B- les 4 signaux de commande du moteur.
Du coté commande par la GGC :
- PUL+, PUL- qui sont la commande de pas.
- DIR+, DIR- qui contrôlent la direction.
- ENA+, ENA- qui contrôlent la mise sous tension du moteur. Cette commande est optionnelle, et permet d’éviter de faire chauffer le moteur lorsqu’il n’est pas utilisé.
Les signaux PUL+, DIR+ et ENA+ sont à relier au +5V sur la GGC. On peut utiliser la broche 20 sur le port J4.

ENA- doit être relié soit à la broche 1, soit à la broche 17 du port parallèle DB25. PUL- peut être relié à la broche 2, et DIR- à la broche 3. Les autres drivers sont connectés en séquence sur les broches 4 à 9. Ceci est juste un exemple, car la configuration des signaux DIR et STEP est complètement configurable avec l’utilitaire ggc_utility.
La configuration de l’adaptateur GGC via l’utilitaire ggc_utility est la suivante:
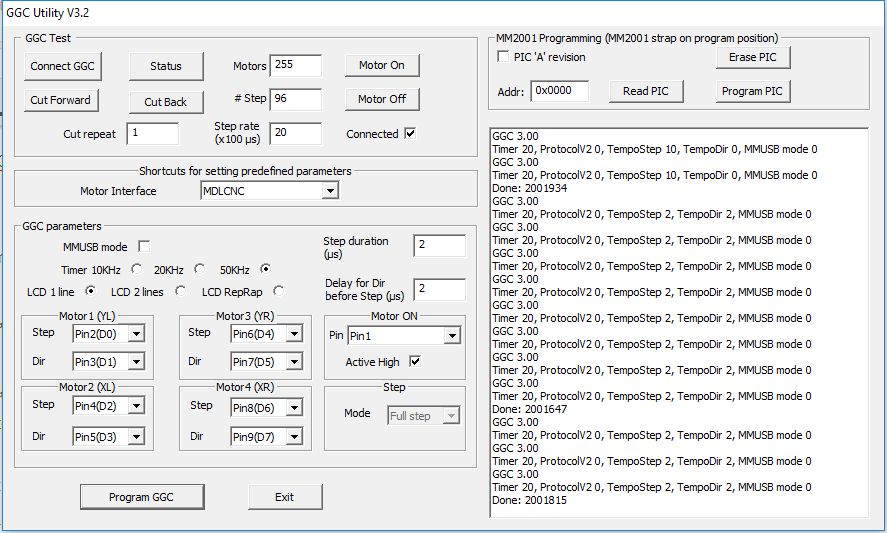
Le timer est à 50Khz, la durée du signal Step et positionnement de Dir à 2 us. Motor ON est sur la broche 1, et en mode active high.
Les sorties sur le port DB 25 sont aussi disponibles sur J4:
- DB.17 (Motor Enable) -> J4.2
- DB.2 (step Motor1) -> J4.13
- DB.3 (data Motor1) -> J4.15
- DB.4 (step Motor2) -> J4.9
- DB.5 (data Motor2) -> J4.11
- DB.6 (step Motor3) -> J4.5
- DB.7 (data Motor3) -> J4.7
- DB.8 (step Motor4) -> J4.1
- DB.9 (data Motor4) -> J4.3
À noter, si vous voulez utiliser J4, vous devez choisir la sortie Pin17 (J4.2) pour le signal Motor ON, car DB.1 n’est pas disposible sur J4.
J’ai fait des tests de déplacement avec GMFC avec un moteur NEMA 23 de 200 pas par tour à vide. L’alimentation des moteurs est à 28V. Plus on monte en tension, plus on peut aller vite. Mais le moteur peut chauffer plus. J’ai obtenu les meilleures performances avec un réglage de l’intensité autour de 2A.
Voici la configuration de la table sous GMFC. Le moteur est connecté sur l’axe YG.
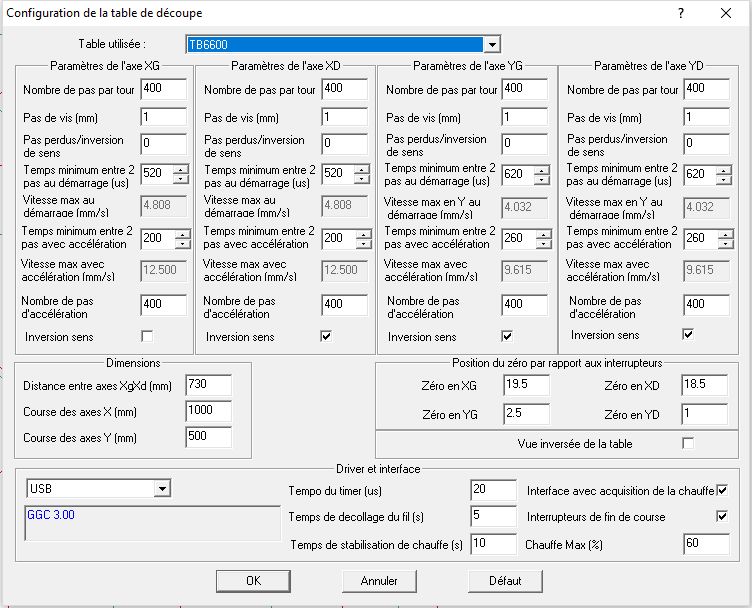
Le moteur est positionné en mode 1/2 pas dans le driver, soit 2×200 pas par tour. Pour valider la configuration en terme de vitesse, il faut faire des déplacement aller/retour avec le dialogue Zero arc. J’ai 400 pas d’accélération soit un tour. Le temps entre deux pas pour la vitesse au démarrage est de 620us. Avec accélération, je suis à 260us.
Ces chiffres sont plutôt bons. Avec ma carte Letmathe, je vais un peu plus vite sur ma table openbuild, mais l’alimentation est également plus élevée en tension.