Pour remplacer le défunt YEP, j’ai craqué sur un contrôleur de chez Alien Power : Jet ESC HV 300A, 16S
Ces contrôleurs sont fabriqués au Royaume-Uni, le patron Bruno Tollot répond rapidement à toutes les questions. Ca change du service chinois… Avec un contrôleur d’outre-manche, j’espérais le bruit d’un Rolls-Royce Merlin… c’est loupé, le moteur est toujours aussi silencieux. Parmi les plus de ce contrôleur, la fonction anti-étincelle avec un câble spécifique à brancher en premier, et une programmation aisée via l’adaptateur USB fourni d’origine. Pas besoin d’acheter un adaptateur supplémentaire… Par contre, le driver de l’adaptateur ne marche pas sous Windows 8.
Voila la bête:

Avec un contrôleur pareil, je peux tester pas mal de configurations de batteries, notamment du 14S.
Grâce à Louis Fourdan, j’ai en test un moteur Scorpion 6530-180.

Le KV réel est de 169, c’est nettement intéressant par rapport aux 188KV du Rotomax 50.
L’intégration dans le Gambitron a été faite via des colonnettes sur le support réalisé pour le Rotomax. Le moteur scorpion est légèrement plus court, et il est nécessaire de l’avancer pour que l’hélice ne frotte pas sur le capot.
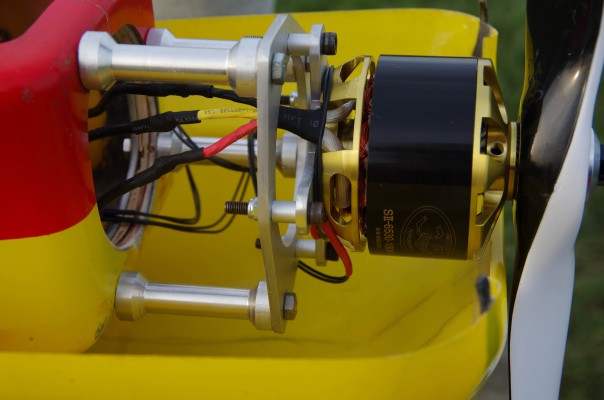
J’ai mis une sonde de mesure de la température autour de la cage. Cela permet de voir si on sollicite le moteur au delà de ses spécifications.

L’hélice est très facile à monter sur le scorpion. Un simple écrou a serrer, et le tour est joué. Le moteur est fourni avec une bague d’adaptation 10mm vers 8mm, pour des hélices percées en 10mm.

Voici quelques résultats des premiers vols:
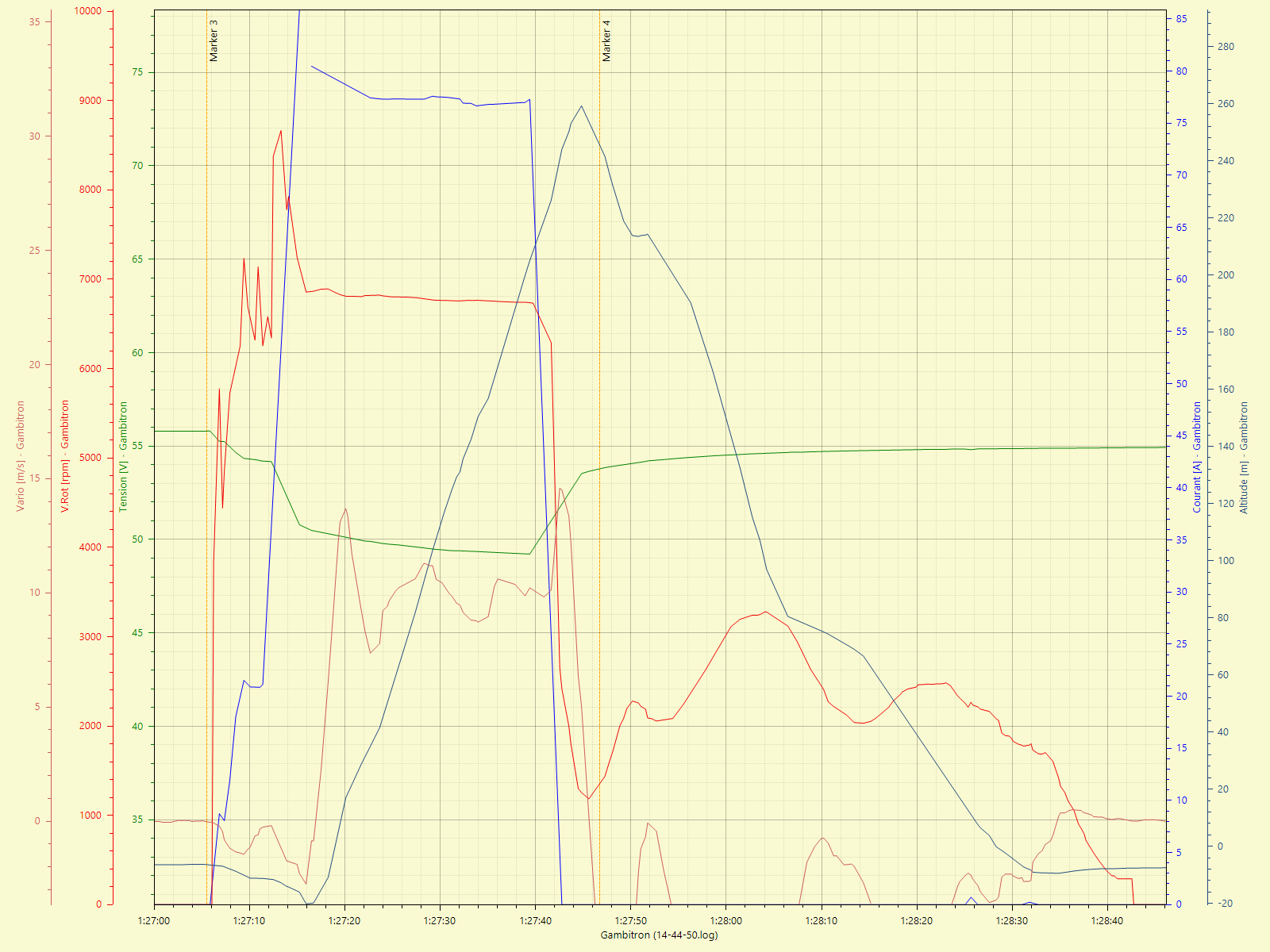
En 14S, le scorpion entraine l’hélice Biela 23×8 avec une conso autour de 80A. Avec les accus chargés, on est a 78A pour 6800 t/min sous 49.6V.
En essai de traction statique avec les accus un peu déchargés (autour de 40%), on obtient 12.5Kg pour 6588 t/min.
Un remorquage d’un planeur F3I a l’atitude de 200m consomme environ 600mAh. Le taux de montée moyen est autour de 10m/s. Voici le graphique de la montée:
Le passage à 14S, avec un moteur plus performant est clairement bénéfique sur la consommation. Double effet, plus d’autonomie, et batterie moins sollicitée, gage d’une meilleure durée de vie. L’augmentation de poids, 400g, reste très modérée. Témoin que le Scorpion 6530 a un meilleur rendement que le Rotomax, il chauffe nettement moins. Je n’ai pas encore de mesures, mais rien qu’au toucher c’est sensible. Le Scorpion est tout juste tiède, alors que le Rotomax était rapidement chaud.
Le Gambitron est un avion très sain, gaz coupé il ne décroche pas. Le remorquage se fait plein gaz une fois que le planeur a décollé. Arrivé à l’altitude de largage, on met a plat et réduit les gaz. Lorsque le planeur est largué, on coupe complètement les gaz, et on amène le remorqueur à 20m au dessus de l’entrée de piste en piqué plus ou moins fort. L’hélice au pas de 8″ en rotation libre fait un aérofrein très efficace, le Gambitron n’accélère pas. L’atterrissage est ensuite une formalité. On ajuste la pente de descente pour choisir le point de touché et il suffit d’arrondir pour un touché en douceur. Si on arrive un peu trop vite, le rebond n’est pas méchant. De fait, le remorqueur est pratiquement prêt à repartir…
Prochaine étape, remorquage de planeurs toutes catégories, et mesure des consommations.