Je voulais faire un petit mirage III pour une turbine en 3S. Au départ, je voulais quelque chose de simple à faire, mais au fur et à mesure de la conception et de la réalisation, j’ai un peu complexifié la partie avant pour ressembler au réel. Celui qui ressemble le plus est un Mirage III-C. En fait, il y a eu deux versions, la première ayant crashé lors du 2ième vol par faute d’une catapulte pas assez tendue.

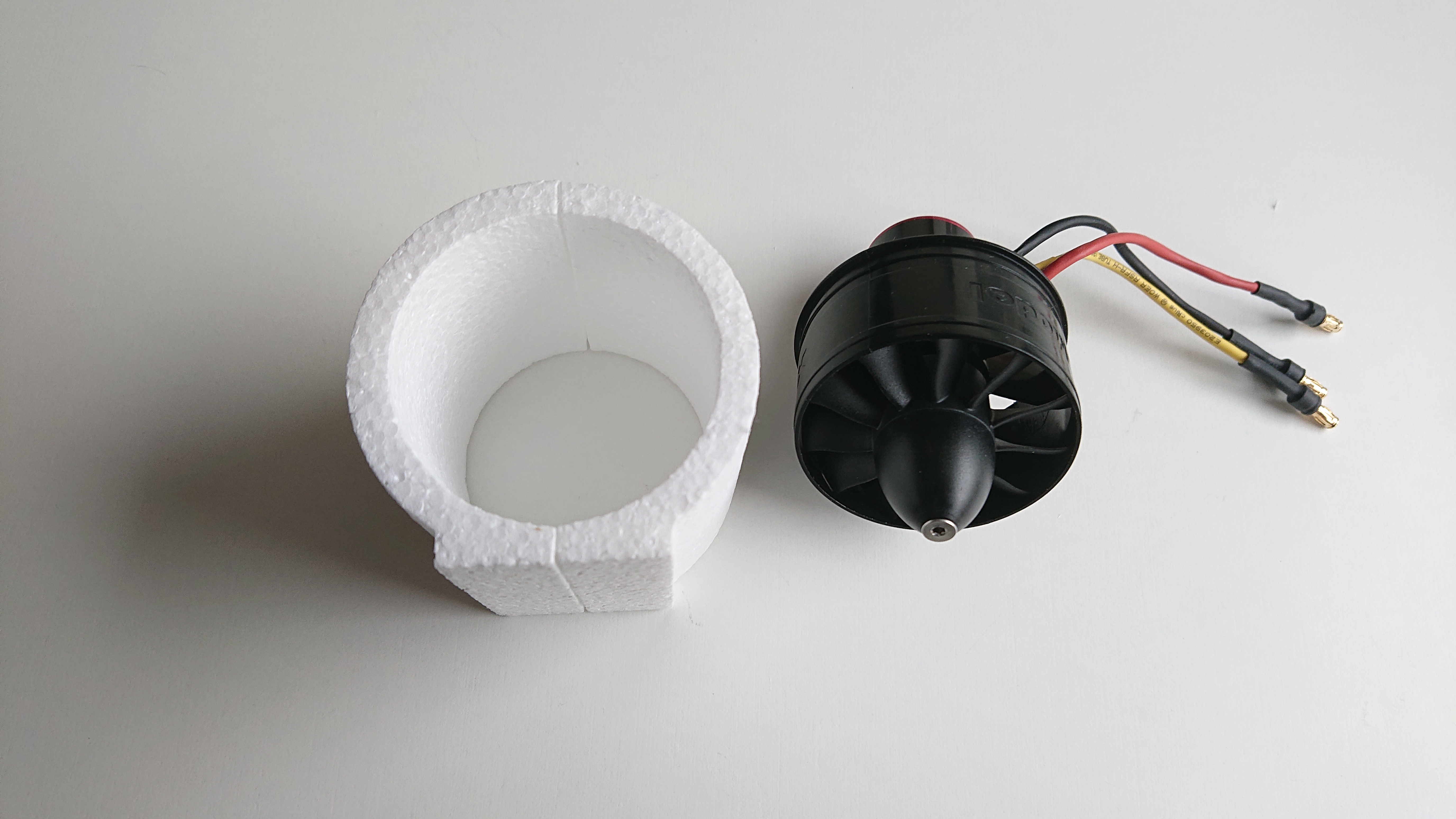
Le mirage III est prévu pour une turbine Changesun 50mm de 11 Pales avec un Moteur 4900Kv 3S, vendue par turbines-rc.com. La batterie est une 3S 2200ma graphène qui assure une autonomie supérieure à 5 minutes.
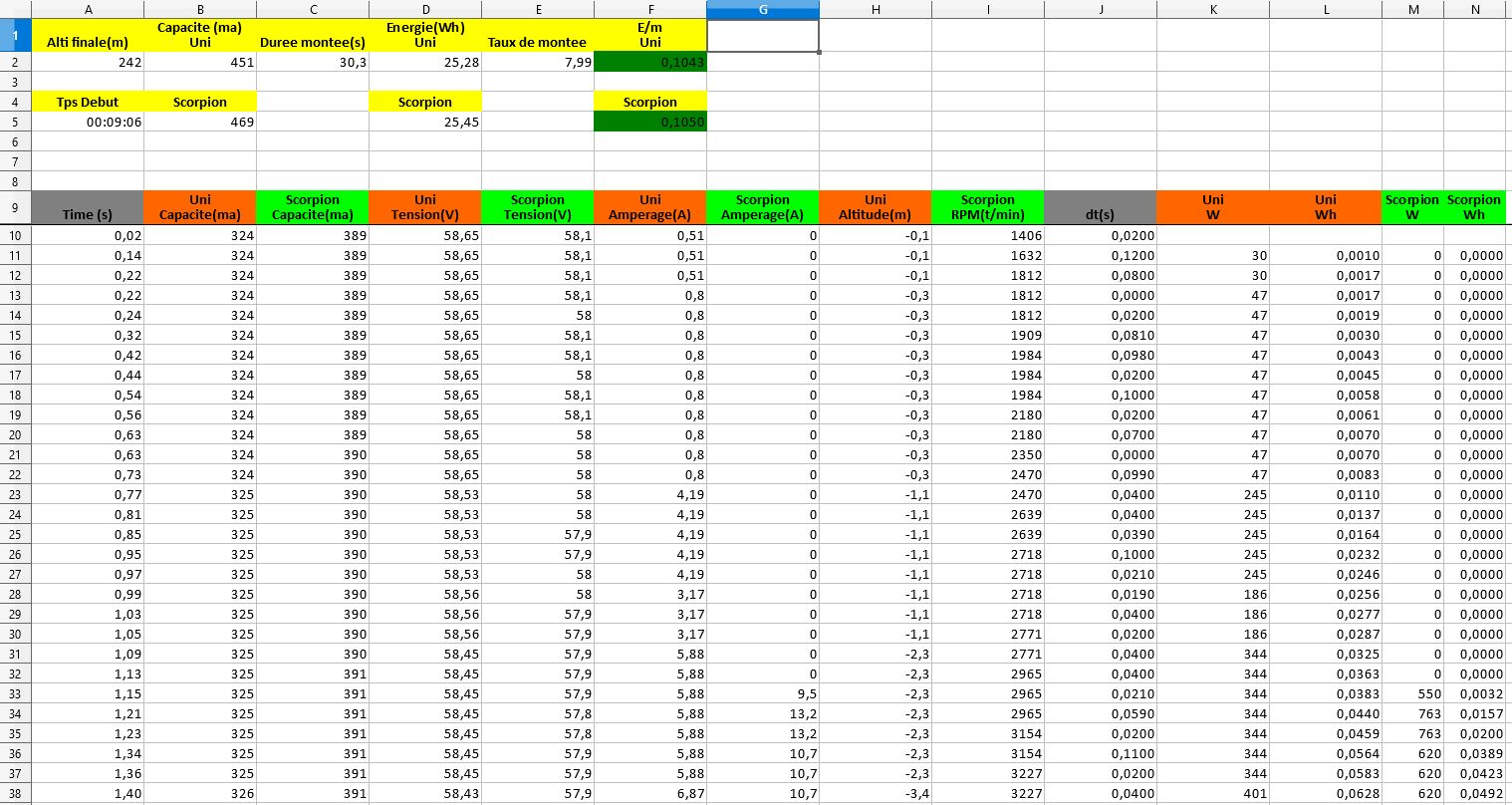
L’envergure du mirage est de 50cm, la longueur du fuselage est de 65cm. En début de pack, la consommation monte au dessus de 40A pour 470W de puissance. Il y a donc de la puissance à revendre.

La conception est faite en 3D sous fusion 360 à partir de photos et plan 3 vues. Voici le résultat:
Le mirage est conçu autour de la turbine et du pack d’accus qui sont les éléments les plus lourd. La turbine est placée assez en arrière, et le pack est juste devant le centre de gravité. Le centrage est autour de 10-12% de l’aile delta. La limite arrière du positionnement du pack est imposée par le « V » du fuselage quand les deux entrées d’air se rejoignent. La surface frontale des deux entrées d’air est légèrement supérieure à la surface d’entrée de la turbine (diamètre 50mm) pour une bonne alimentation en air.
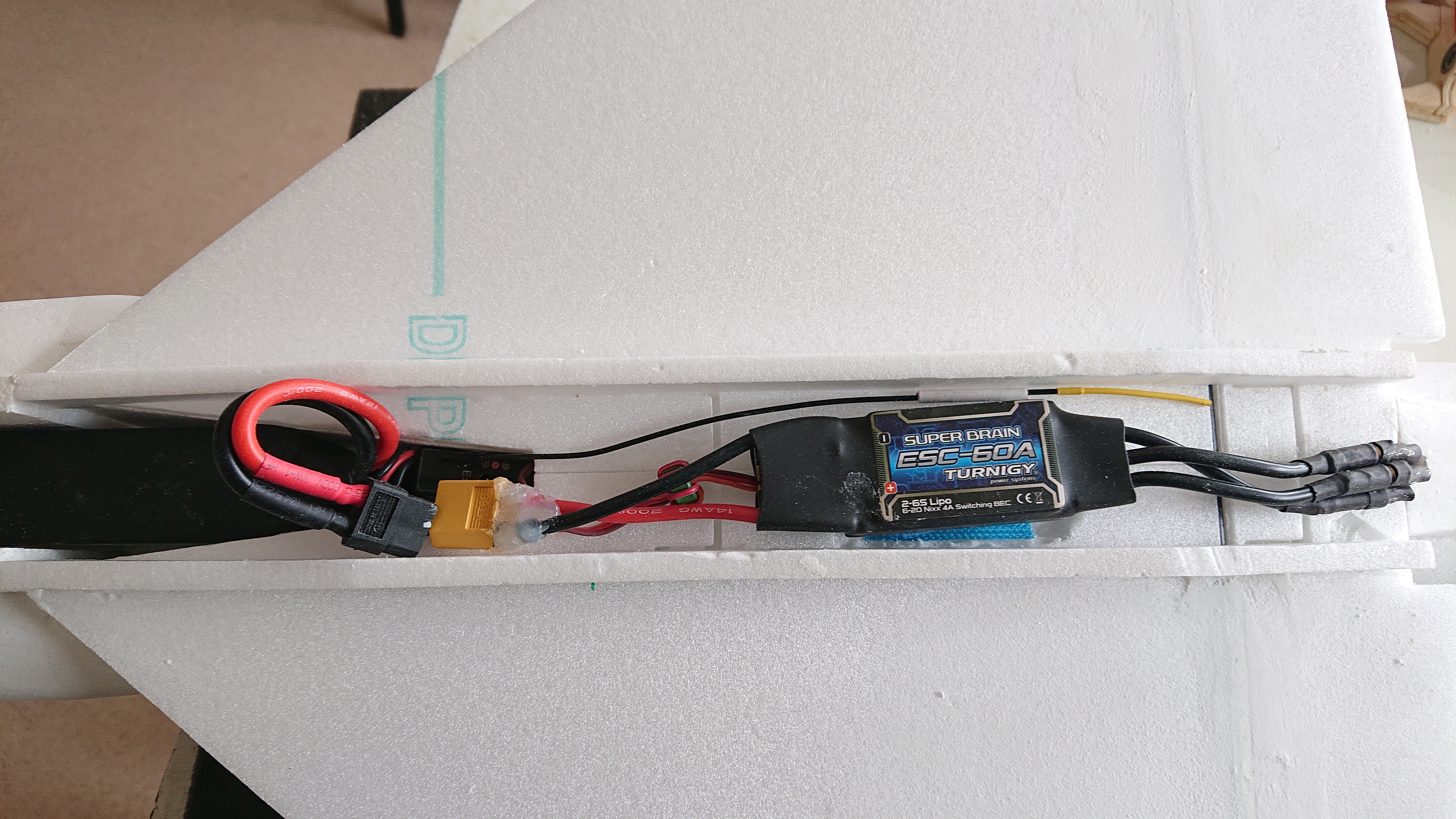
Le contrôleur du moteur est placé dans une boite en dessous de l’aile qui surélève un peu pour l’atterrissage. Le récepteur est monté verticalement à l’extrémité du V, derrière la batterie.

Construction
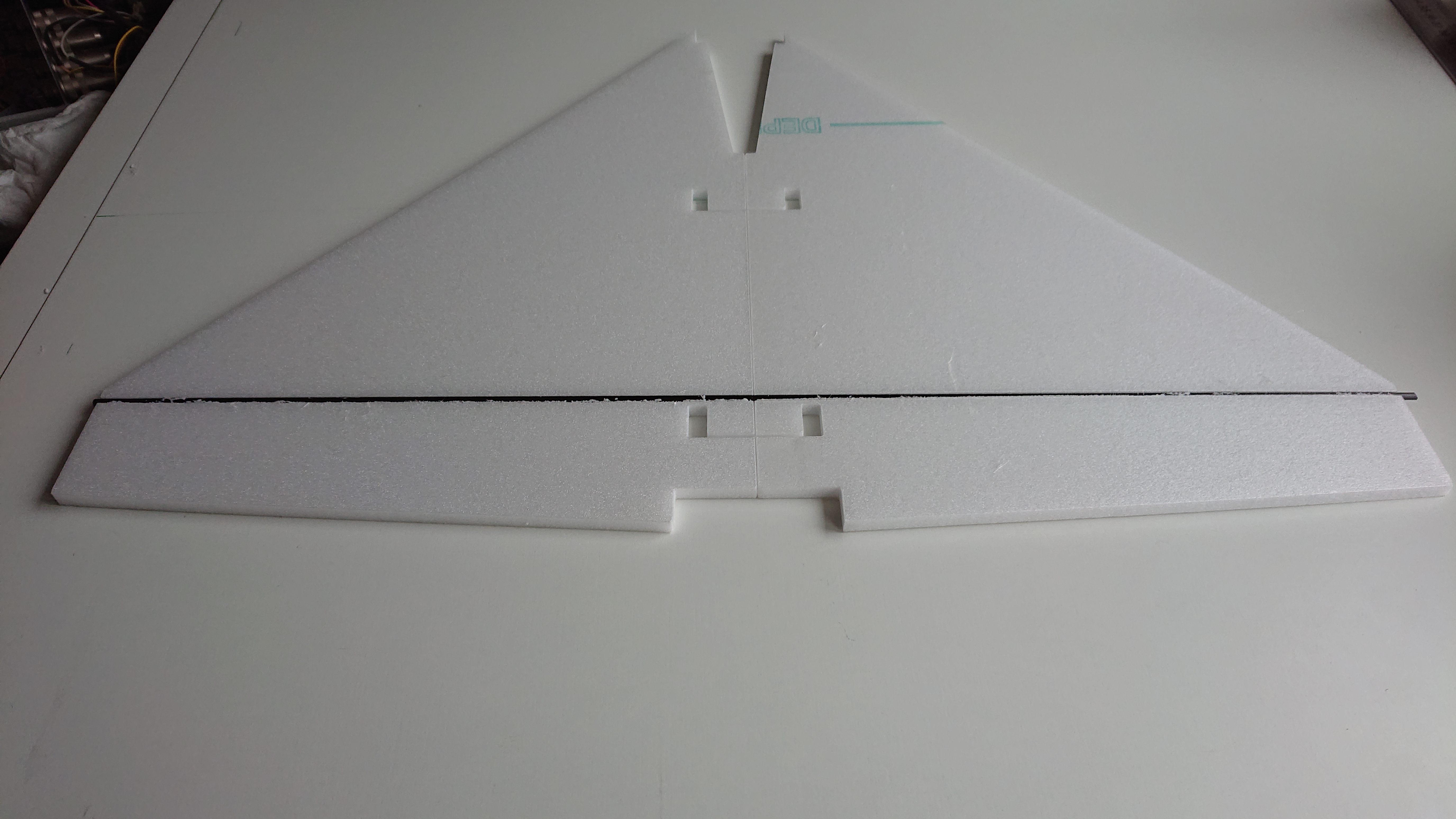
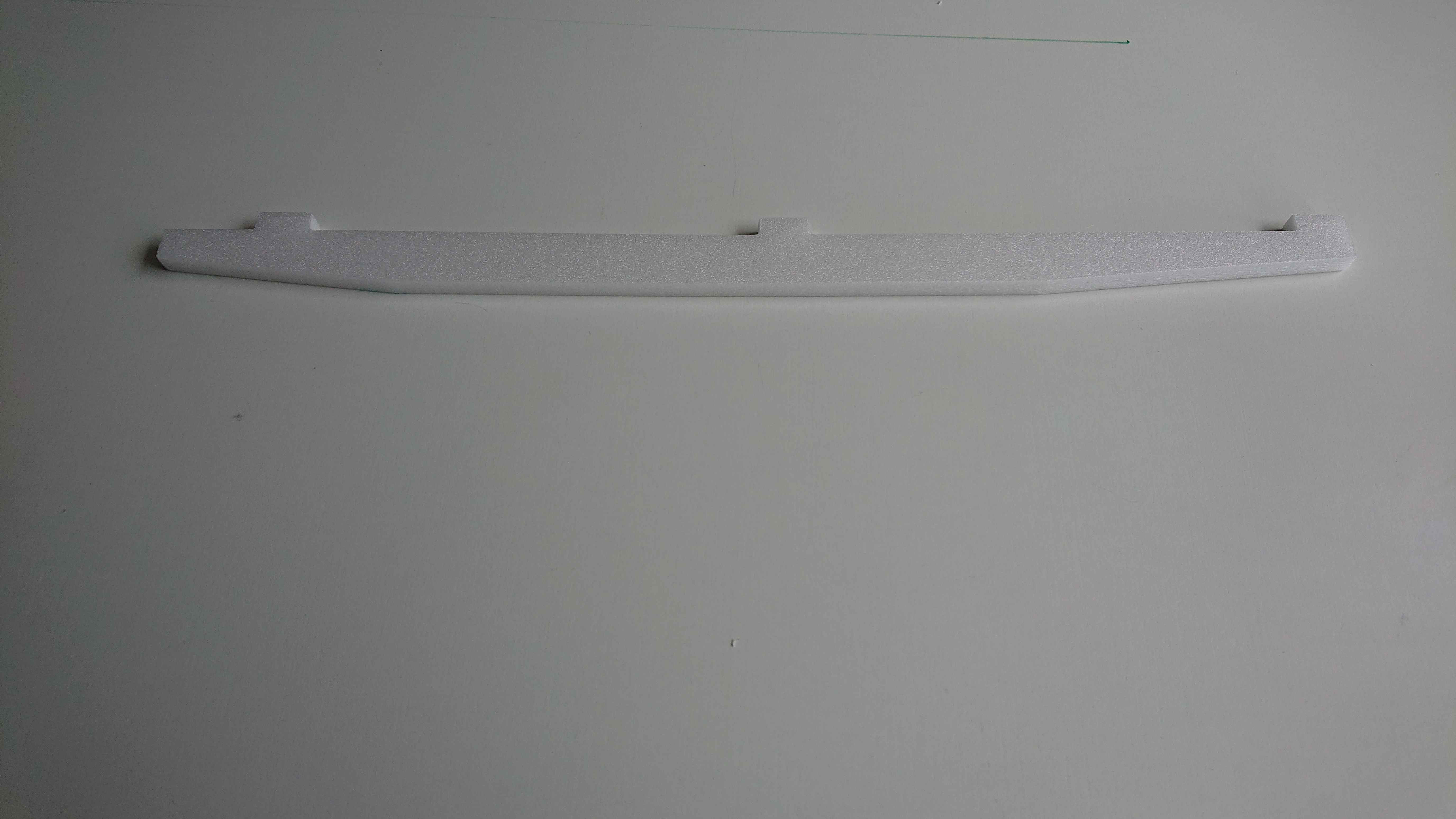
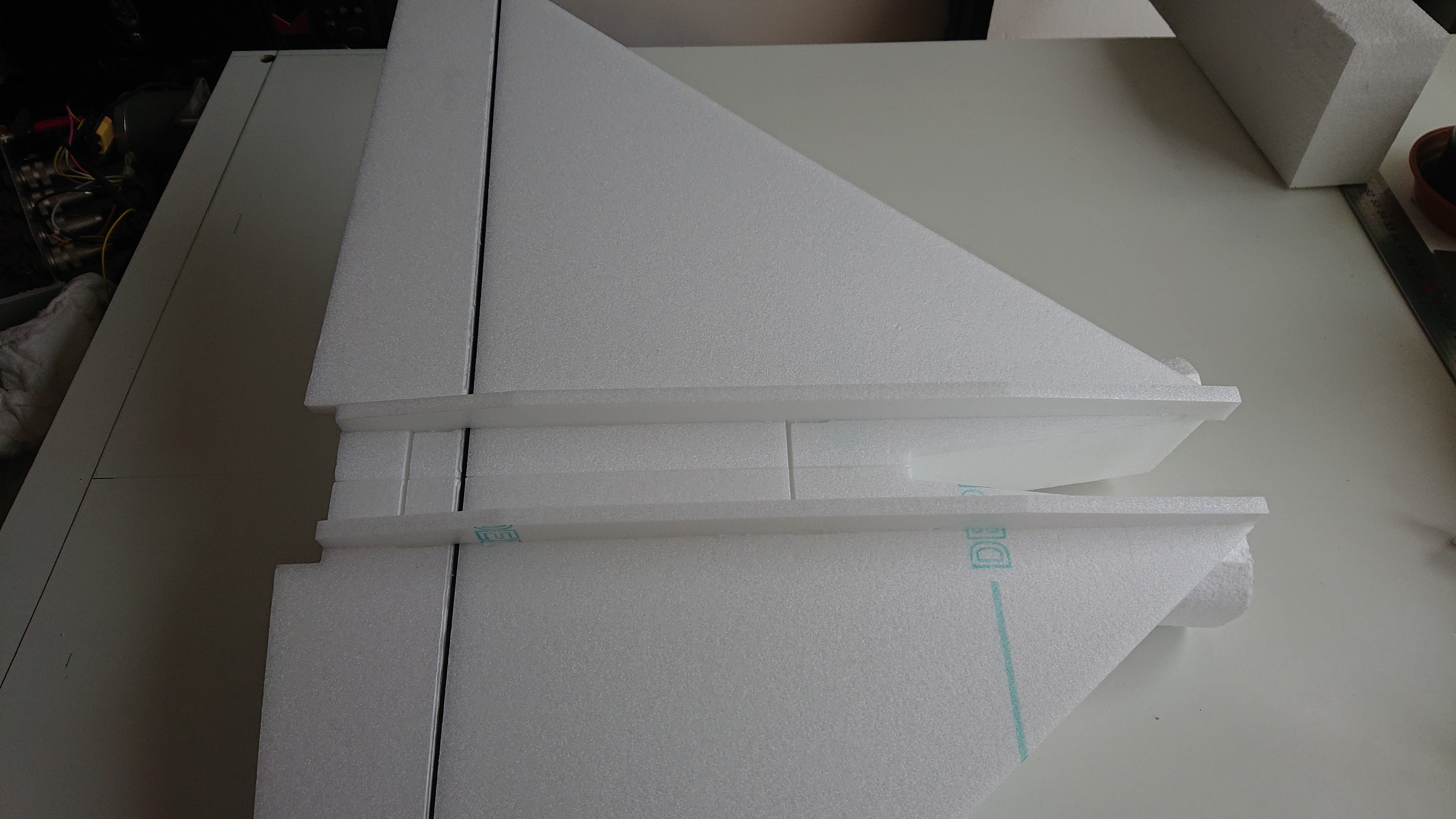
La construction s’effectue sur la base de l’aile qui est découpée en deux parties dans du dépron de 6mm. Elle est renforcée par deux longerons pour la rigidité. Le longeron avant (version 2) est au centre de gravité et sert à renforcer l’aile au niveau de la prise en main lors du catapultage.

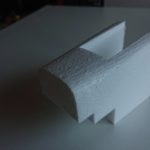
La découpe du fuselage est réalisée dans du polystyrène expansé. Il faut une table pas trop large et assez haute pour découper les pièces de l’avant du fuselage qui ont beaucoup de flèche.
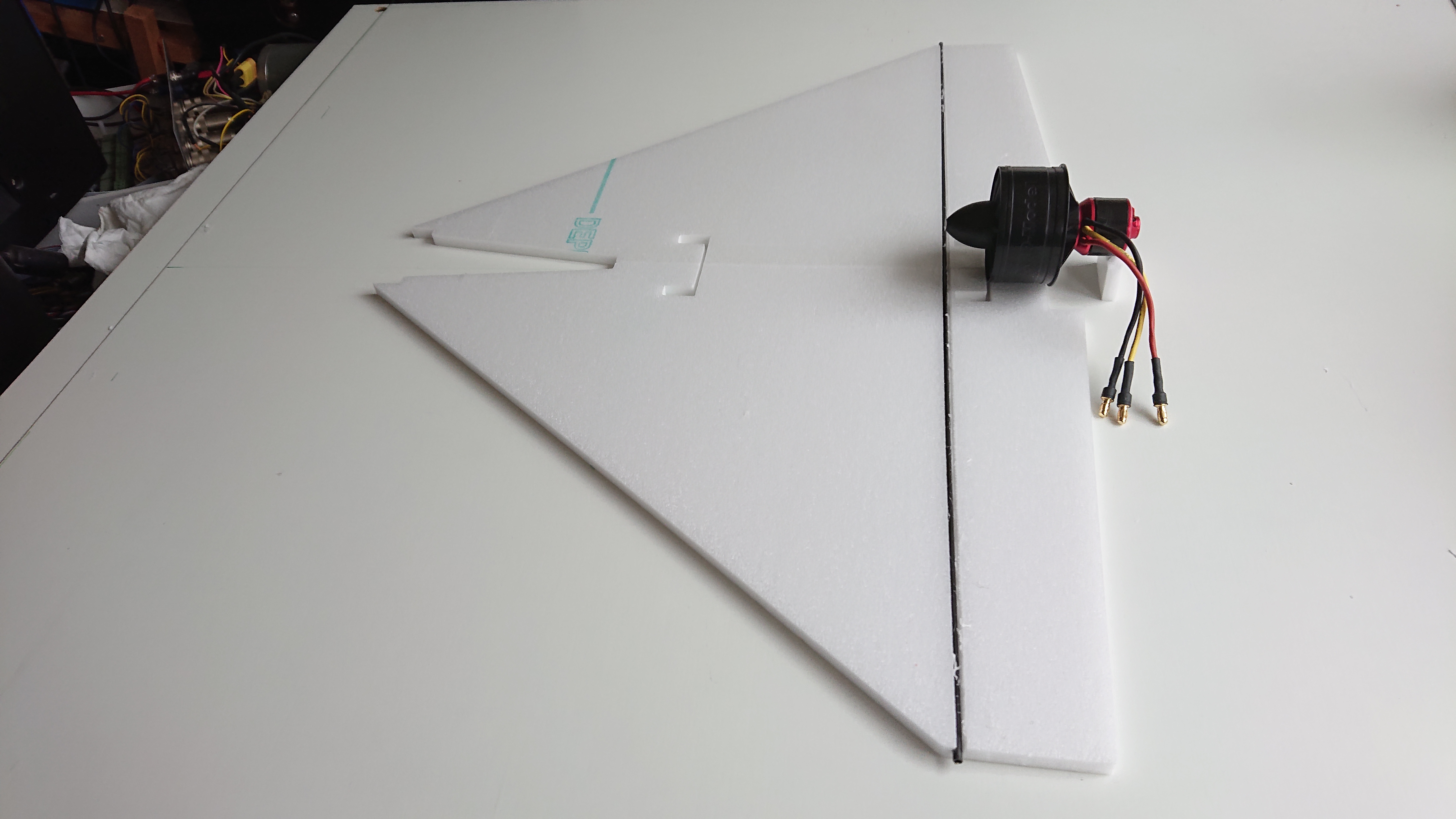
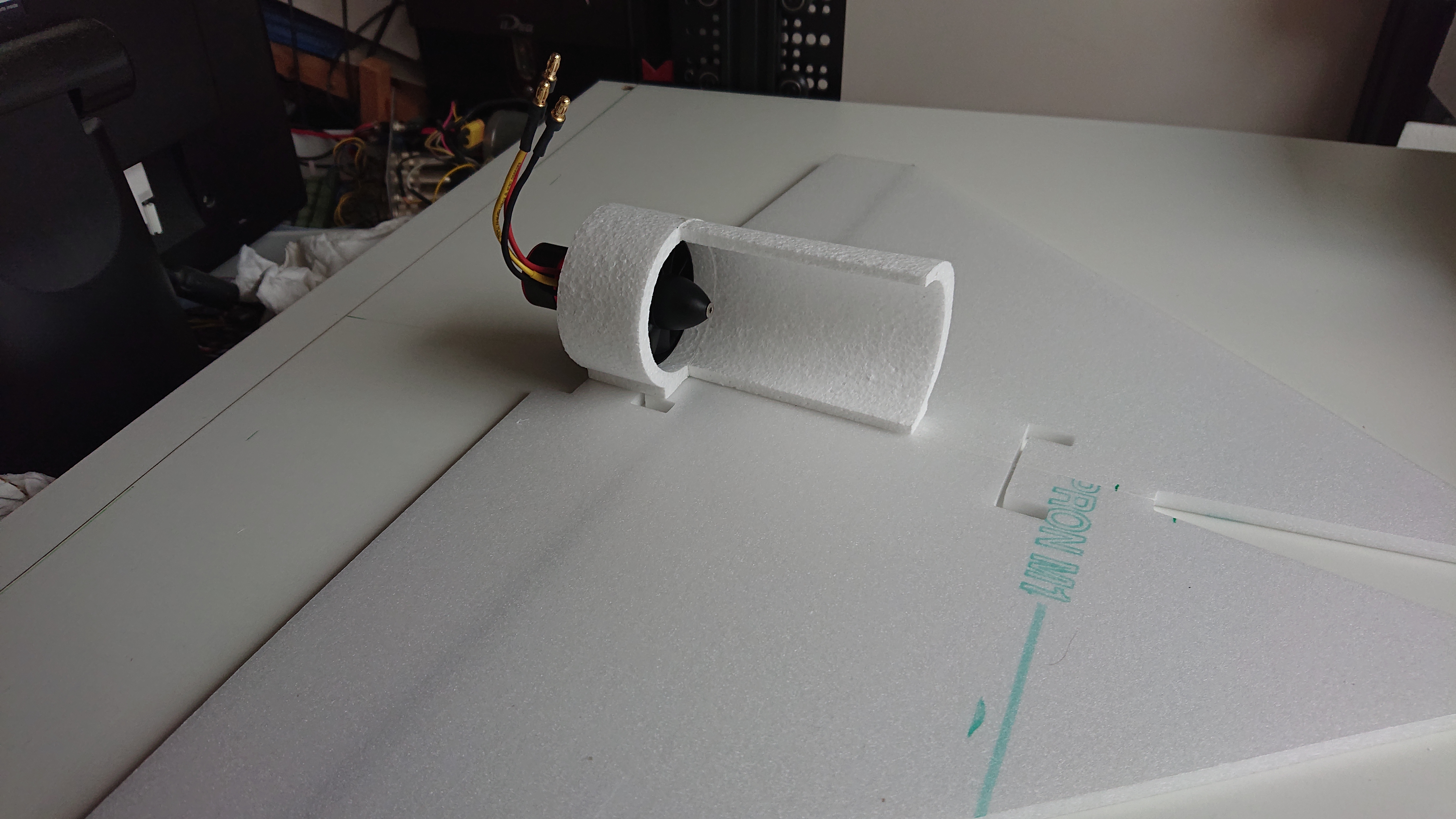
On commence par la turbine qui est située au bord de fuite de l’aile.

La turbine et son support.


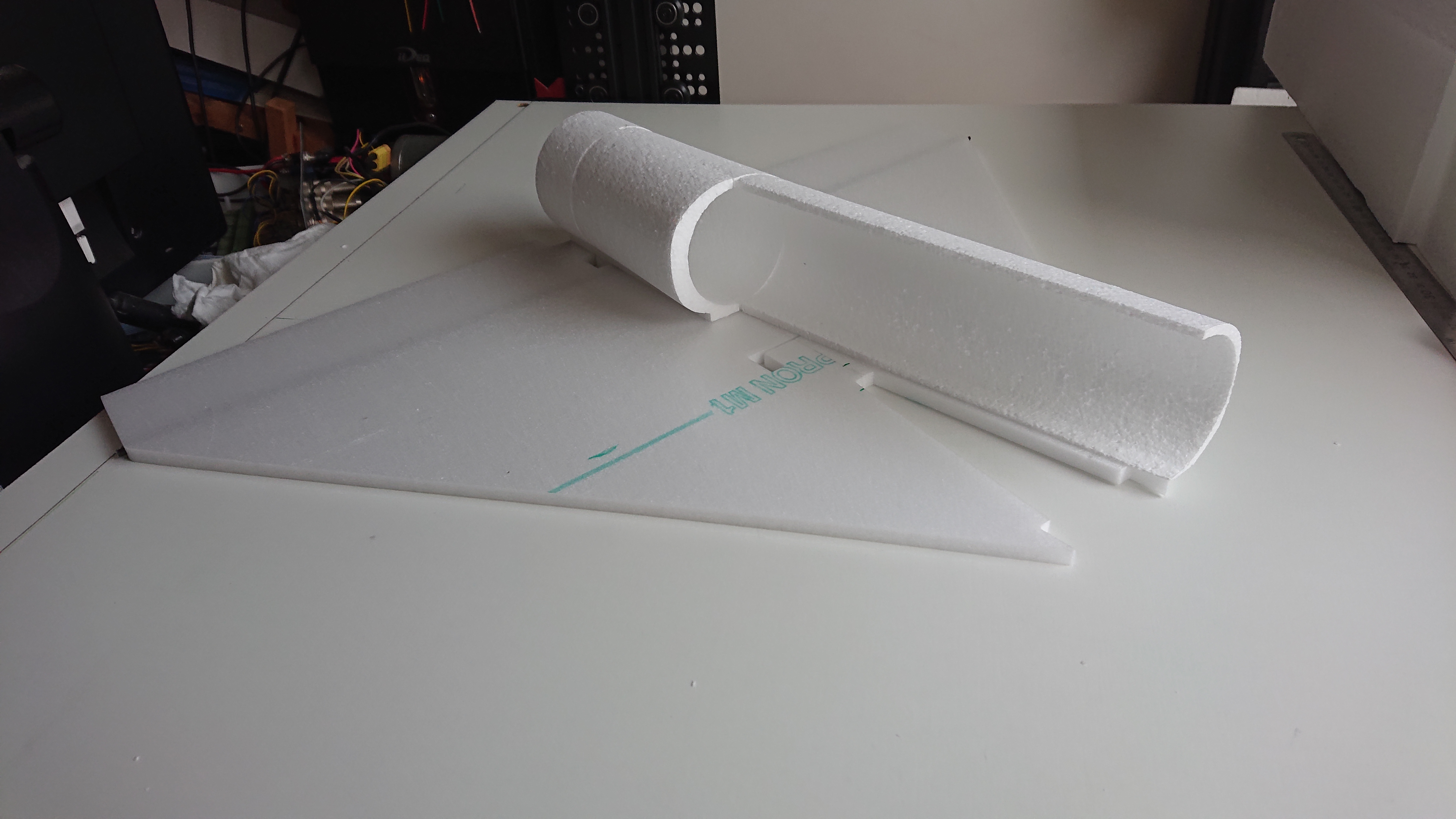
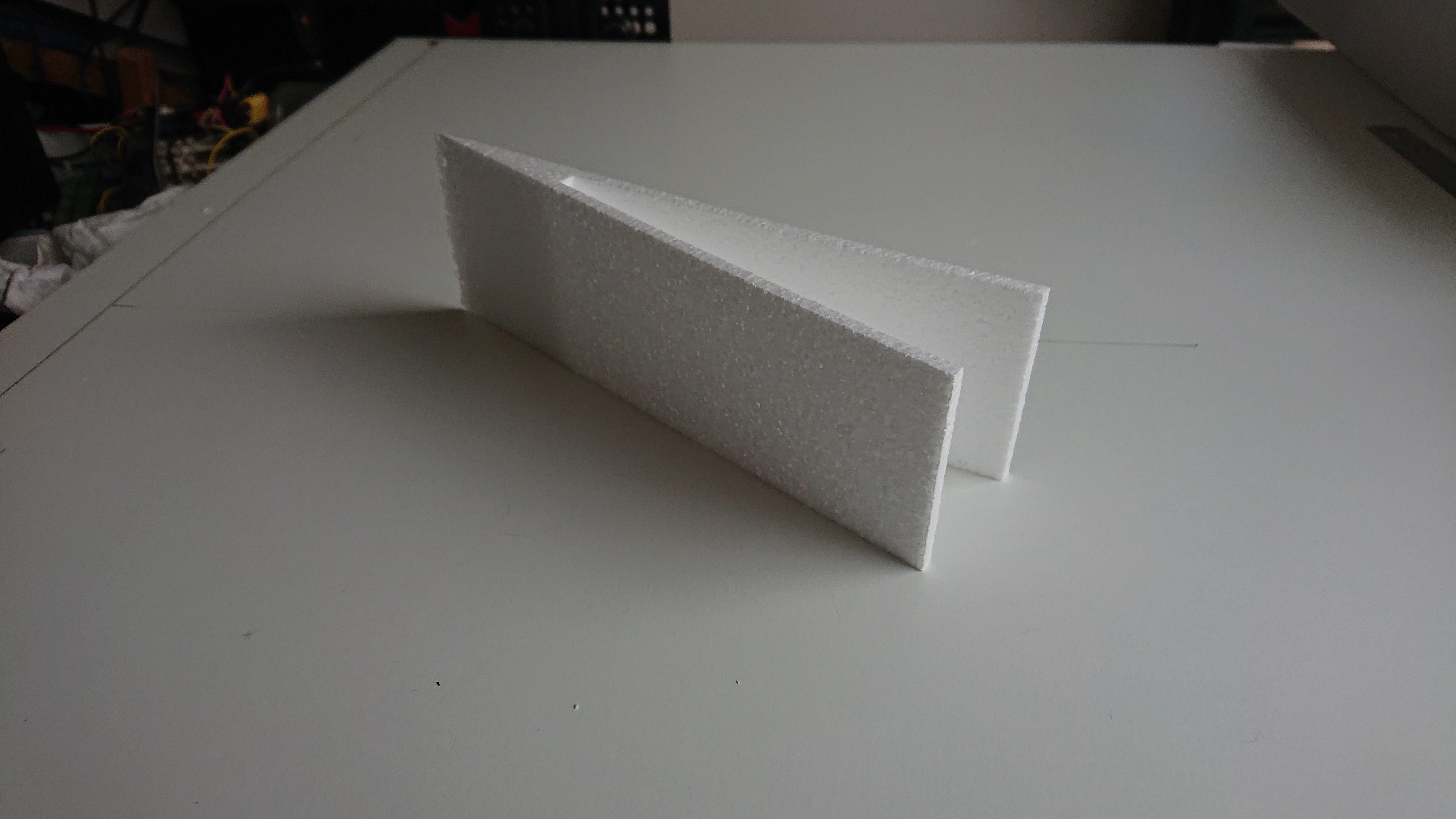
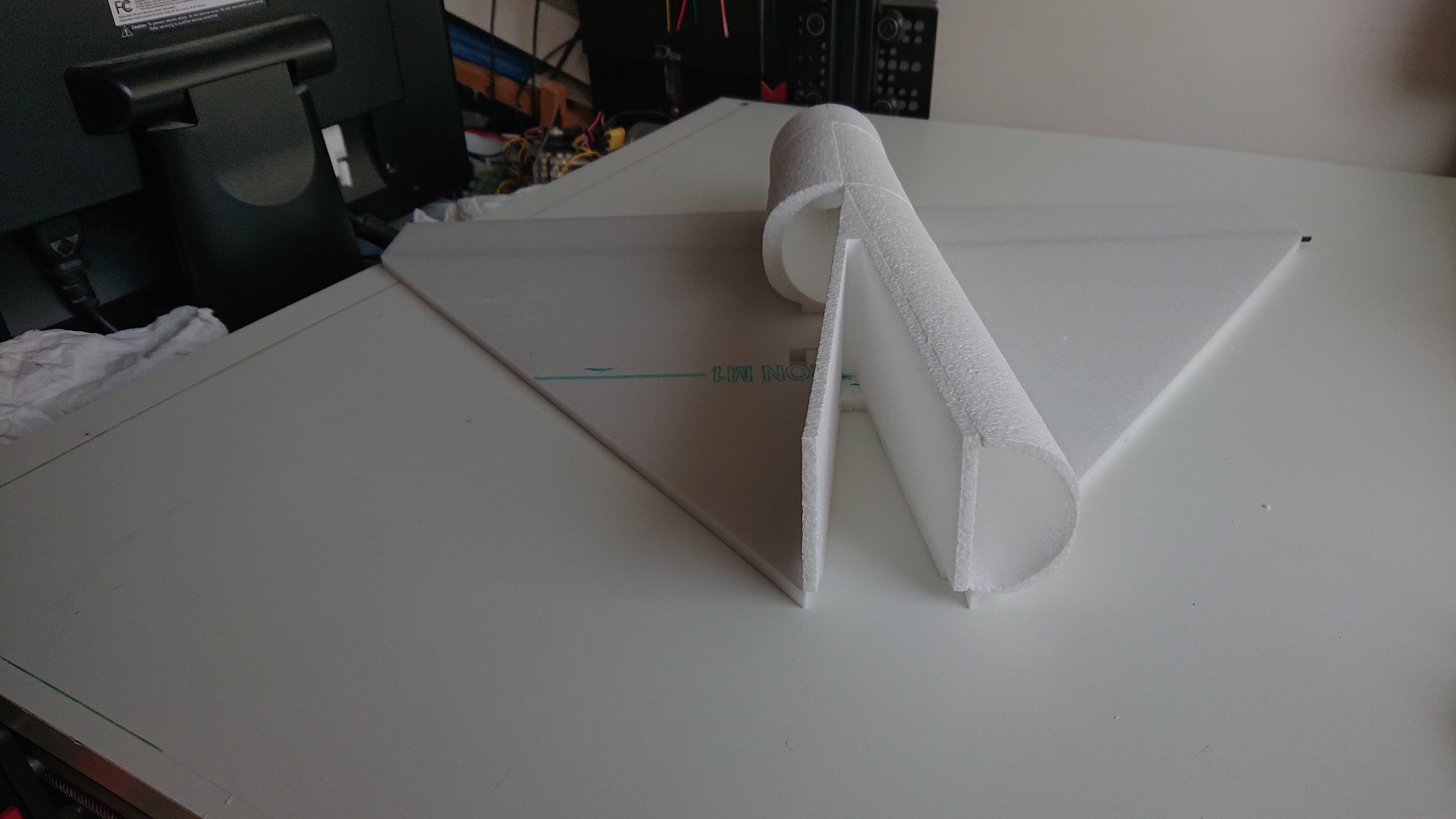
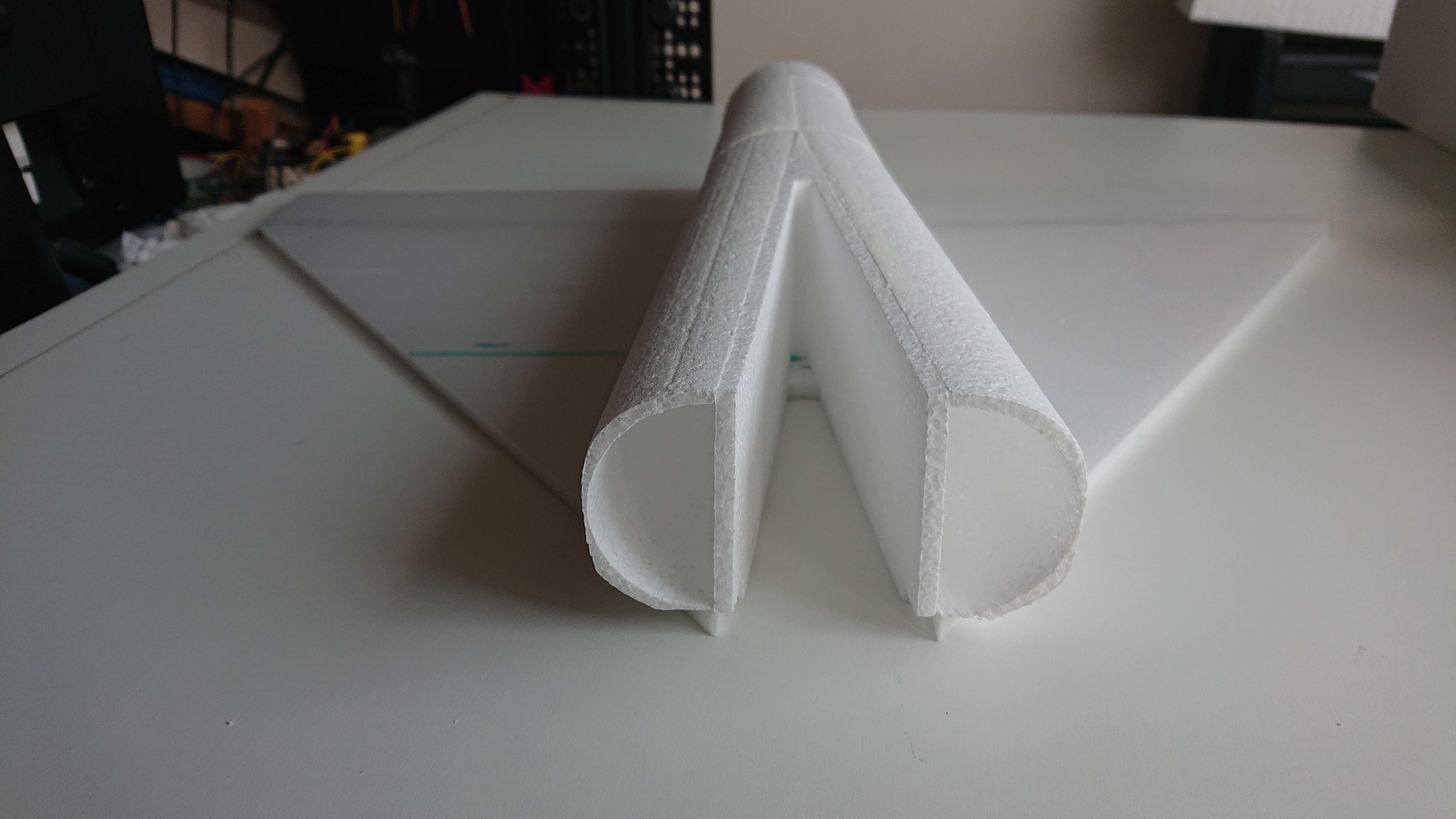
Les pièces du fuselage et de la veine d’air sont symétriques.


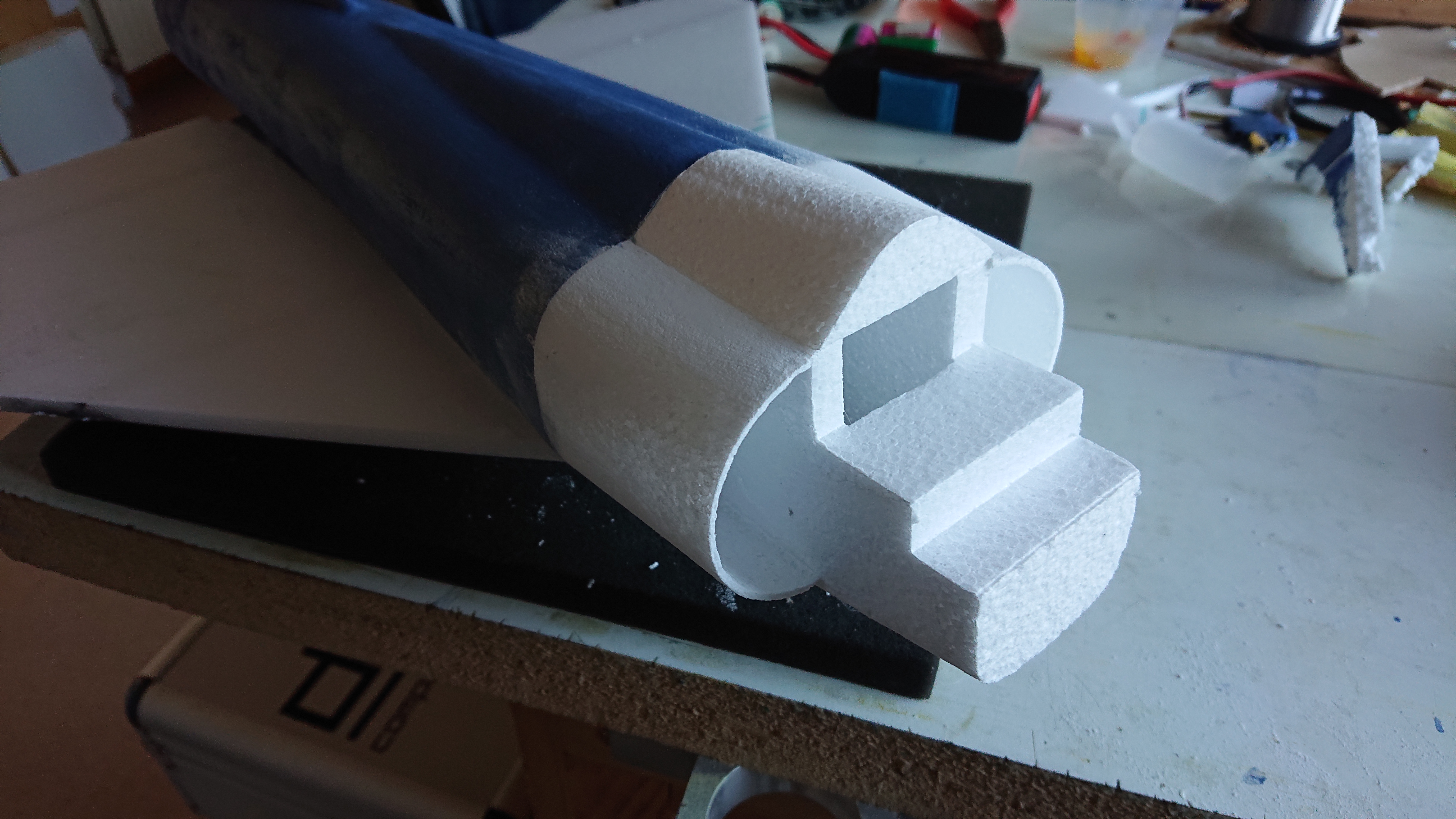
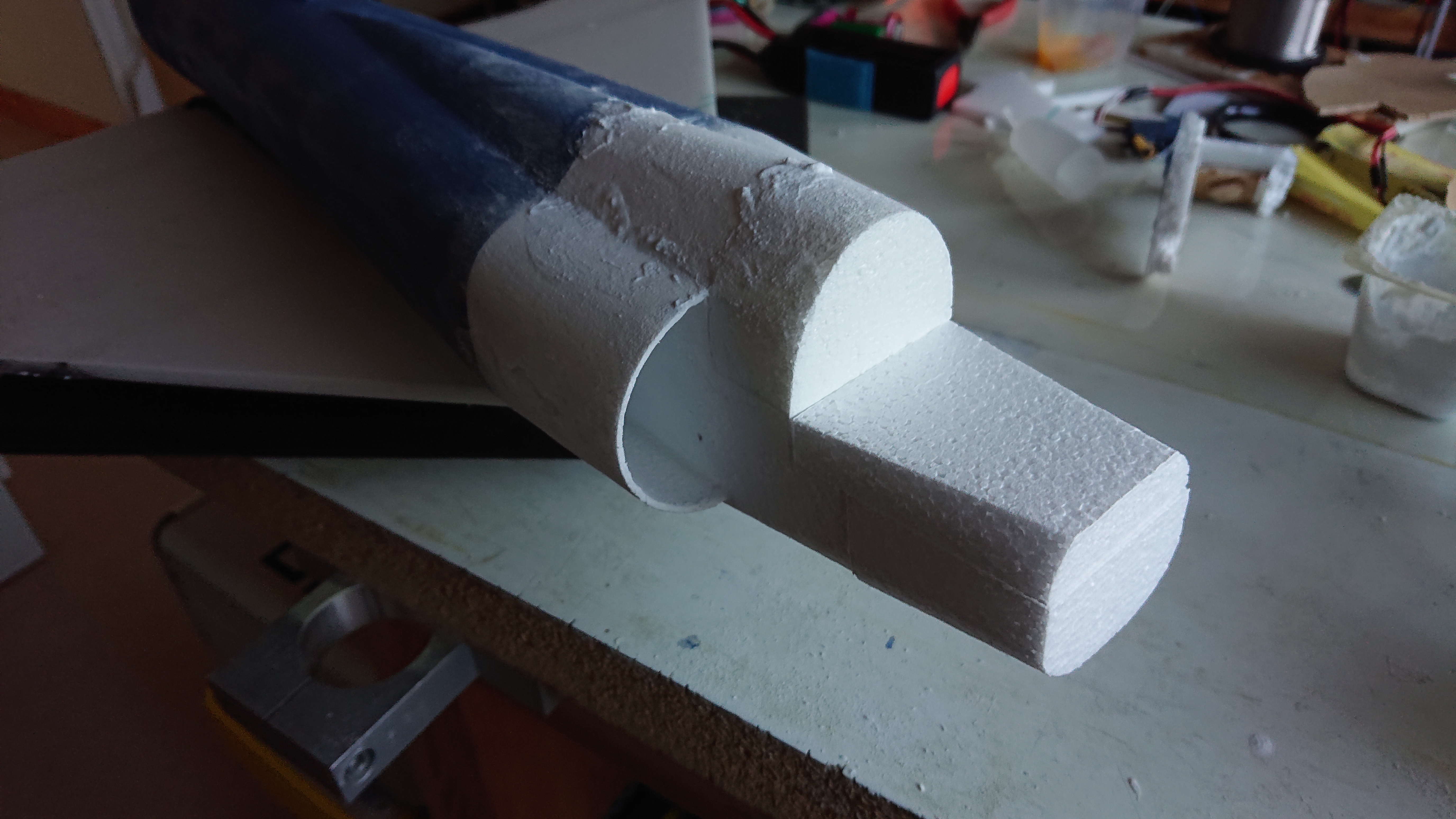
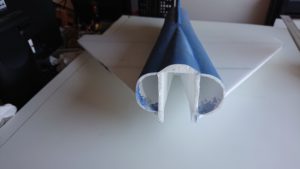
Découpe et collage du V de la veine d’air.





Découpe et pose des flancs du dessous du fuselage.


Collage de la turbine et pose de la tuyère de sortie. Il est important que le bord de fuite de la tuyère soit fin pour un bon rendement.



En ce qui concerne la partie avant du fuselage, je présente la version 2 du mirage. L’avant est la partie la plus complexe et il est nécessaire d’assembler plusieurs pièces pour reconstituer une verrière et le nez.
Le point de départ est la pose du dos.
Puis on rajoute le milieu. Cette pièce est très complexe et nécessite 4 étapes de découpe: le profil, la face, deux tronçonnages des cotés, évidemment de l’intérieur.
Ensuite on pose les entrées d’air. Sur la photo, on voit le mastic avant ponçage.

On complète progressivement avec les autres pièces.



Jusqu’à la mise en place du nez.

Les servos d’élevons (9g) sont à moitiés encastrés dans l’aile par fraisage. Ils sont positionnés juste à l’arrière du longeron principal et sont collés à la colle bi-composant.

Les palonniers sont en fibre de verre.

L’articulation des élevons est réalisée à la fibre de verre encollée avec de la colle universelle diluée dans de l’alcool à bruler. La fibre est ensuite mastiquée au polyfilla dilué dans de l’eau. Une fois que c’est sec, on peut réaliser l’entaille en V pour l’articulation.

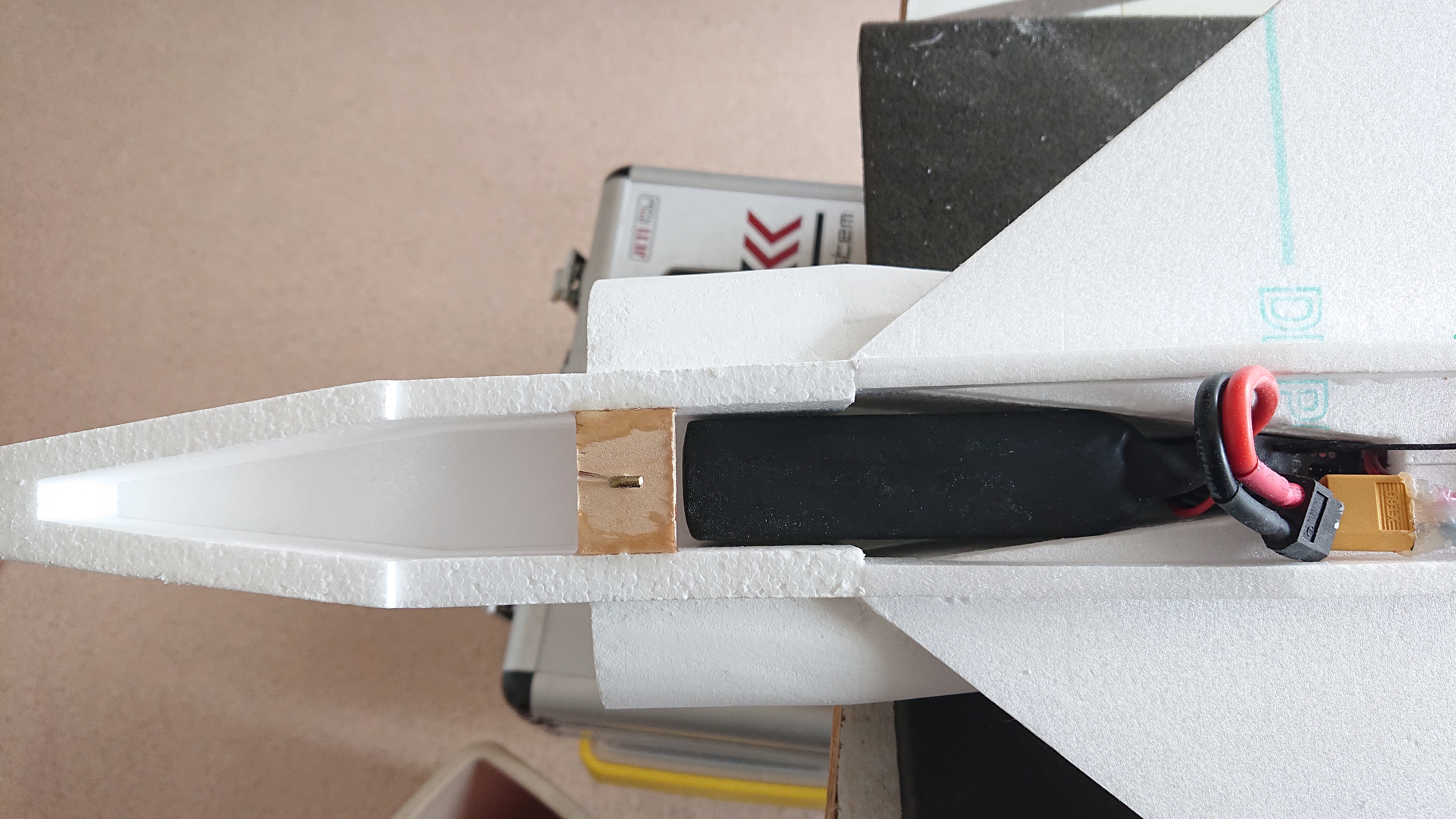
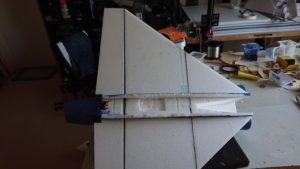
Le crochet de catapultage est situé en avant du bord d’attaque. Il est fixé dans une plaque de contre-plaqué qui reprend les effort. La contrainte sur le positionnement du crochet est qu’il faut pouvoir retirer l’accu.

L’accu est fixé par une bande de velcro sur un faux plancher en dépron 6mm. Le pouvoir de fixation est très fort, et il n’en faut pas une grande longueur sinon on ne peut plus retirer l’accu.

Le dessous est réalisé en dépron 3mm. La trappe accu est fermée par un aimant, et une rondelle en métal.

La trappe est articulée par un morceau de scotch pour le moment. Je referai en fibre.

Finition
La finition est réalisée en enduisant le polystyrène avec du mastic ultra léger type Polyfilla, puis ponçage. Plusieurs couches sont nécessaires pour enlever la majorité des défauts.
Le modèle est peint ensuite avec de la peinture acrylique qui est passée au pinceau. Les cocardes sont imprimées à l’imprimante jet d’encre, découpées puis collées à la colle universelle.
Je me suis inspiré de la décoration d’un mirage IIIC de l’escadron 02/100 « Seine » en 1978.

Je n’ai pas trouvé le même bleu, pas simple avec le confinement. Le dessous est blanc pour le moment. Mais ce n’est pas assez visible en vol. Il faudrait des bandes jaunes ou rouges.

Électronique
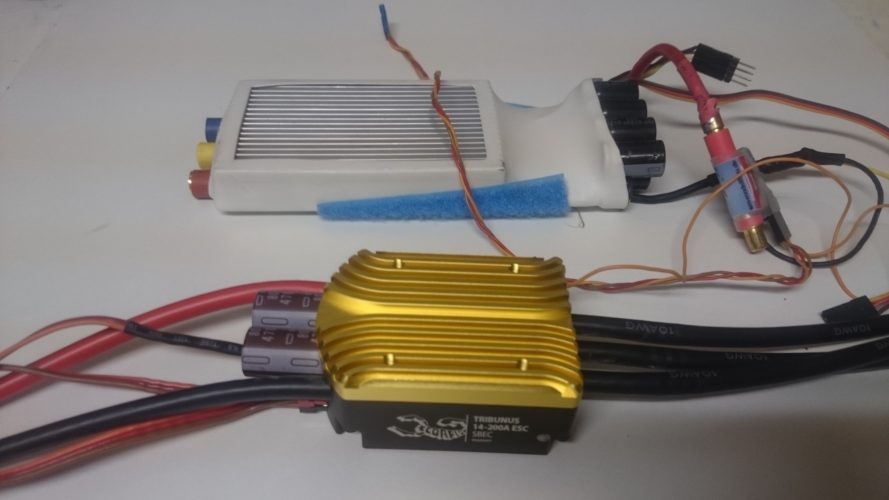
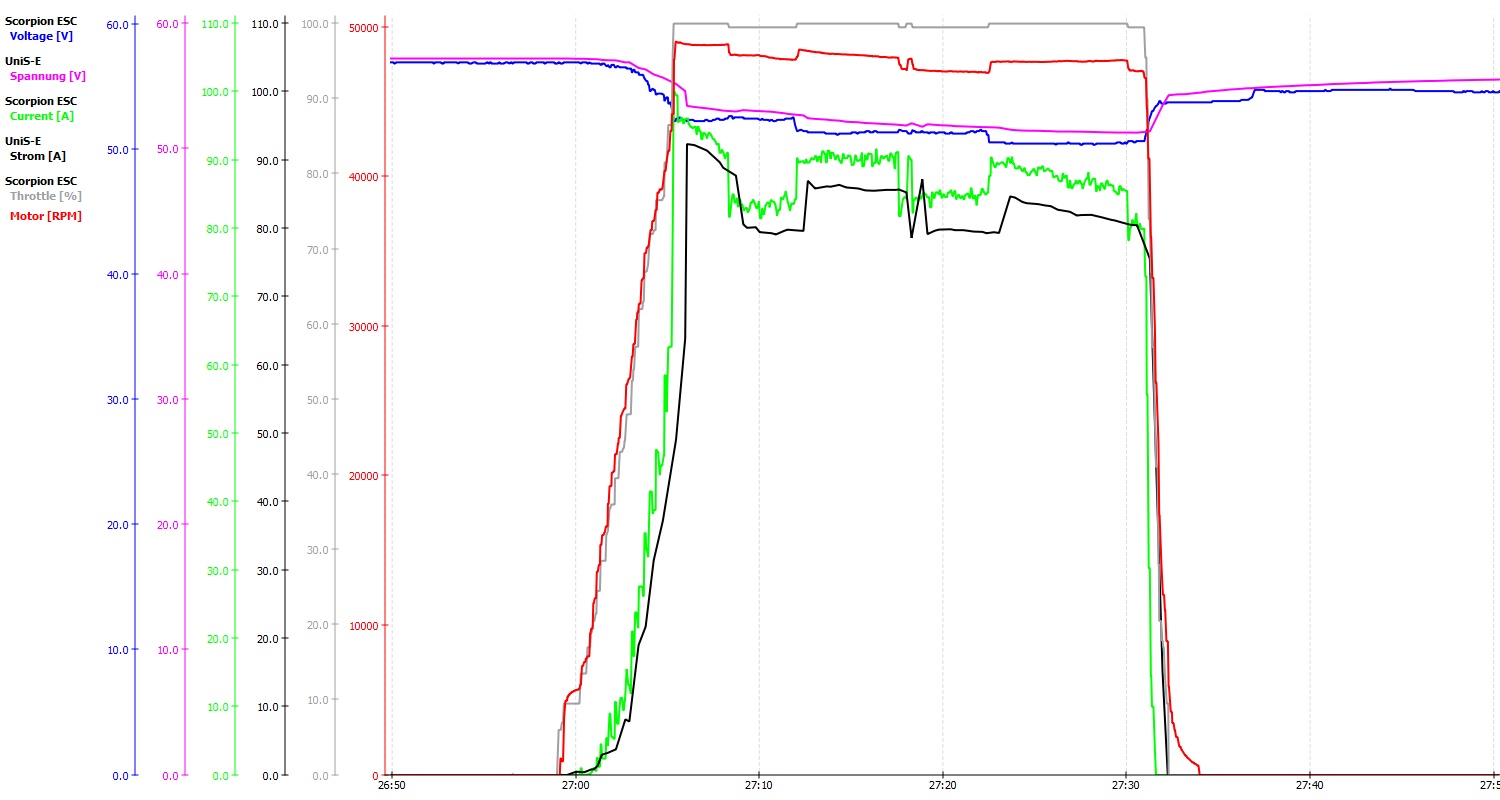
Le moteur consomme 40A en pointe. J’ai donc surdimensionné le contrôleur en choisissant un 60A que j’avais en stock, car le poids n’est pas trop un problème à cet endroit. Par ailleurs, le contrôleur n’est pas accessible une fois le dessous collé… et il n’est pas trop ventilé également.
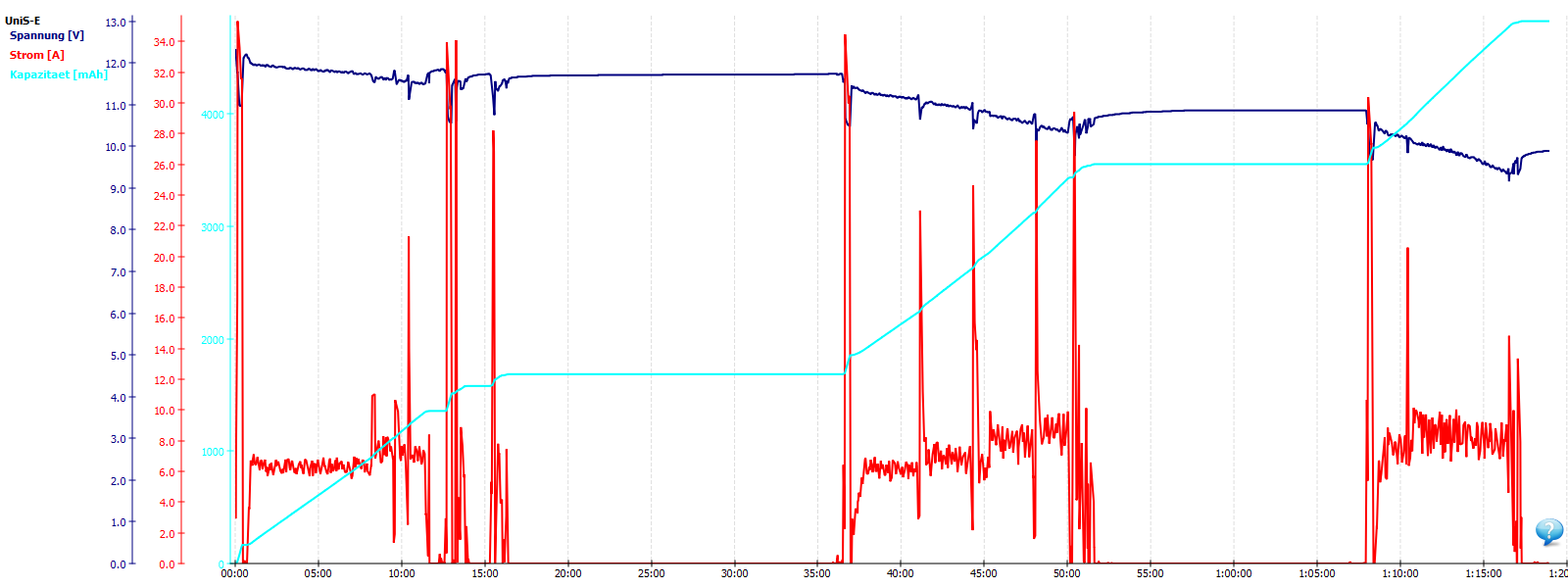
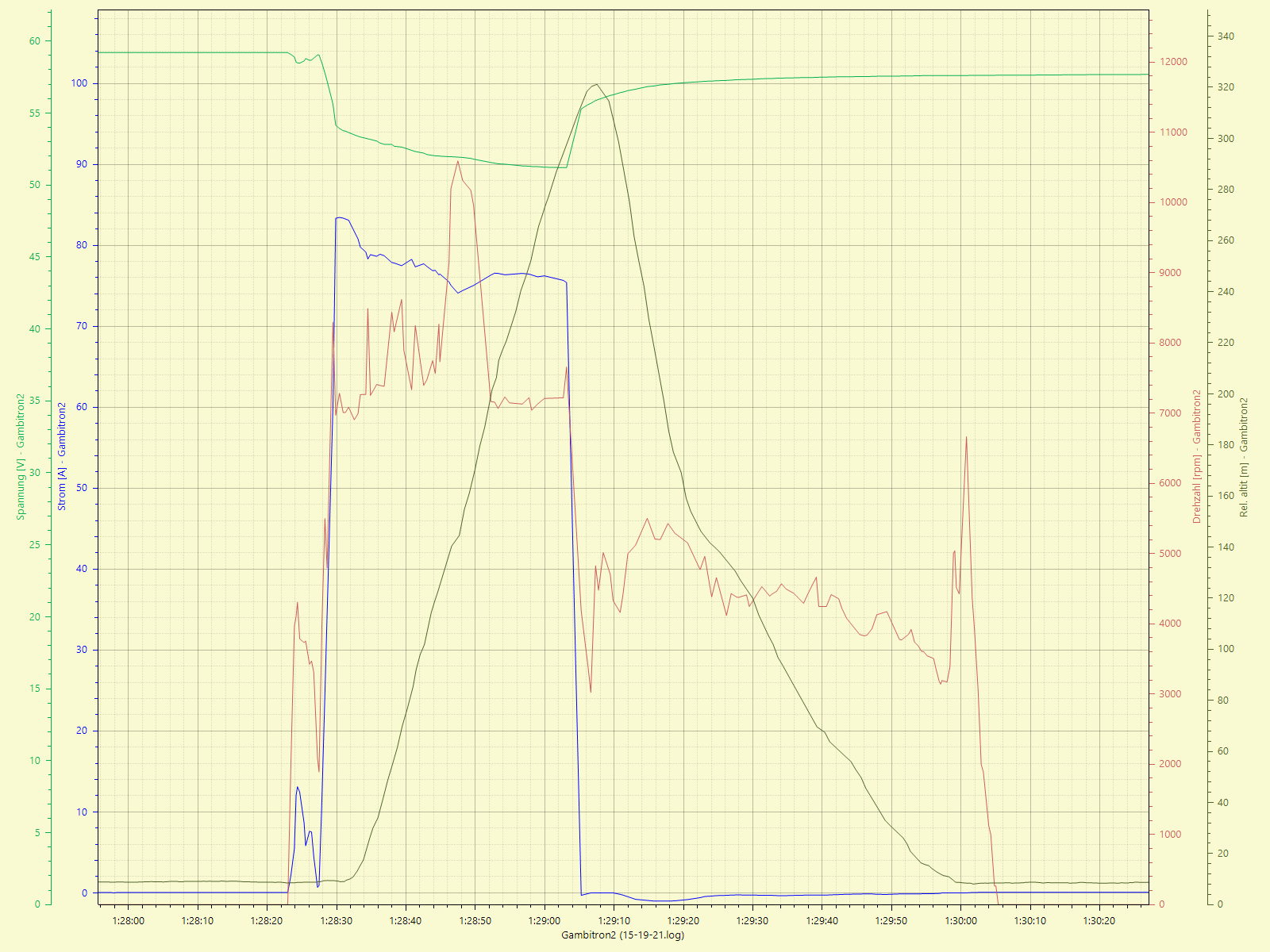
Le moteur est surpuissant. Voici un test en statique (avec la version 1):
Le récepteur est un Jeti Rex6 assist. Il est tout petit et le gyroscope intégré permet de stabiliser le modèle au lancement. Le problème majeur de ce genre de modèle est que la puissance de la turbine est telle qu’elle induit un effet de roulis lorsqu’on met les gaz. Le gyro permet de calmer la bestiole.
Poids
Le poids du modèle en ordre de vol est de 475g, dont:
- contrôleur, 50g
- récepteur, 11g
- servos, 18g
- turbine et moteur, 80g
- batterie 2200ma graphène 3S, 190g.
Vol
Voici la vidéo du premier vol de la version 2.
Il faut tendre fortement la catapulte pour donner la vitesse initiale au modèle (environ 25 pas). Sinon il s’enfonce et c’est le crash assuré. C’est d’ailleurs ce qui est arrivé à la version 1.
Le vol est très rapide. J’ai mesuré une vitesse de 126Km/h avec un GPS.
À l’issue de ce premier vol, il restait plus de 30% dans les accus. J’ai donc une autonomie supérieure à 5 minutes en jouant sur les gaz.
Il reste à régler le gyro qui surcompense pour le moment et le débattement des ailerons qui est encore trop important.
Fichiers de découpe
Les fichiers de découpe pour GMFC PRO sont disponibles ici.