Un nouveau contrôleur pour le Gambitron. L’avantage par rapport à l’Alien Power est la télémétrie intégrée. Plus besoin d’avoir un capteur Unisens-E séparé, dont les mesures de vitesse de rotation sont parfois inexactes. Autre avantage, le Tribunus ajuste dynamiquement la vitesse de découpage.

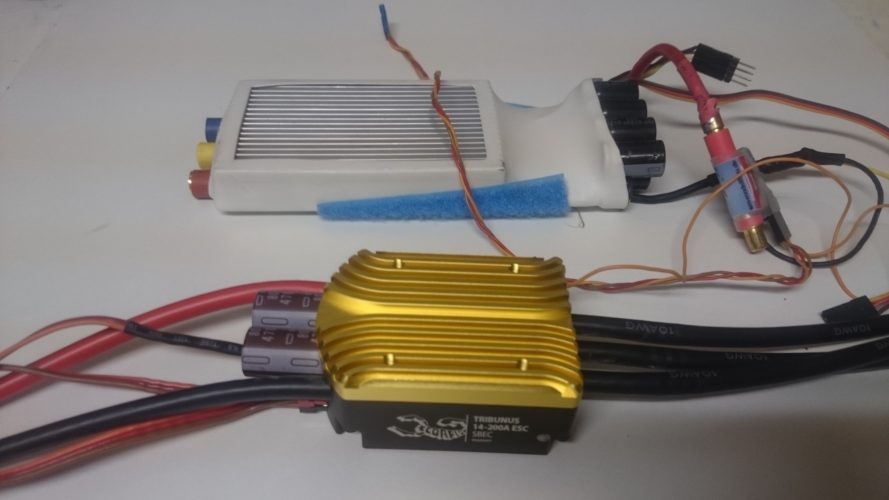
L’intégration dans le Gambitron n’a pas posée de problème. Il y a largement la place pour le Tribunus au dessus du train. Une large bande de velcro suffit pour le fixer. C’est impossible a détacher simplement.

Le Tribunus possède trois prises : Master pour la commande des Gaz, Slave pour la connexion a un régulateur type V-bar pour les hélico, et PC pour la programmation et la télémétrie. En fait, j’ai pas mal galéré pour arriver à faire marcher la télémétrie du Tribunus sur mon récepteur Jeti R18. Quelques explications qui peuvent aider les copains en Jeti dans le futur. Il y a maintenant deux modes pour les échanges d’info de télémétrie sur le système Jeti: le mode sensor, et le mode Exbus. Le mode senseur est unidirectionel capteur -> master (par exemple le récepteur). Le mode Exbus permet a des équipements de dialoguer (ex: récepteur vers récepteur).
Nos senseurs actuels (altimètre, température, UNIsens) travaillent en mode sensor. Normal… Par contre, ils ne marchent pas sur une entrée-sortie en mode Exbus.
Le Tribunus bizarrement marche en mode Exbus. Je ne trouve pas que ce soit un bon choix. Sur le R18, il n’y a qu’une entrée/sortie (EXT) programmable en mode sensor ou Exbus. De fait, soit j’ai mes capteurs classiques, soit j’ai le Tribunus. Par contre, sur les récepteurs récents REX il y a trois entrées/sorties programmables en mode Exbus ou senseur. On peut donc mixer les capteurs et équipements.
Je tiens à garder le R18, car j’utilise une transmission double avec un satellite Rsat pour réduire les effets de masquage. Quelles sont les solutions:
1- Scorpion change le fonctionnement du Tribunus en mode senseur.
2- Jeti fait une mise à jour du firmware du R18 pour avoir plusieurs entrées/sorties télémétrie programmable. J’ai demandé, ce n’est pas possible pour raisons matérielles.
3- Plus réaliste.. André Lambert m’a suggéré d’utiliser le R18 en mode Exbus et le Rsat en mode senseur pour mes autres capteurs. Il a fallu tirer un cable vers la prise EXT du Rsat qui est situé sous la dérive pour maximiser la couverture des antennes.
Premiers Tests
Pour le moment je garde l’Unisens-E dans le Gambitron afin de comparer les mesures.
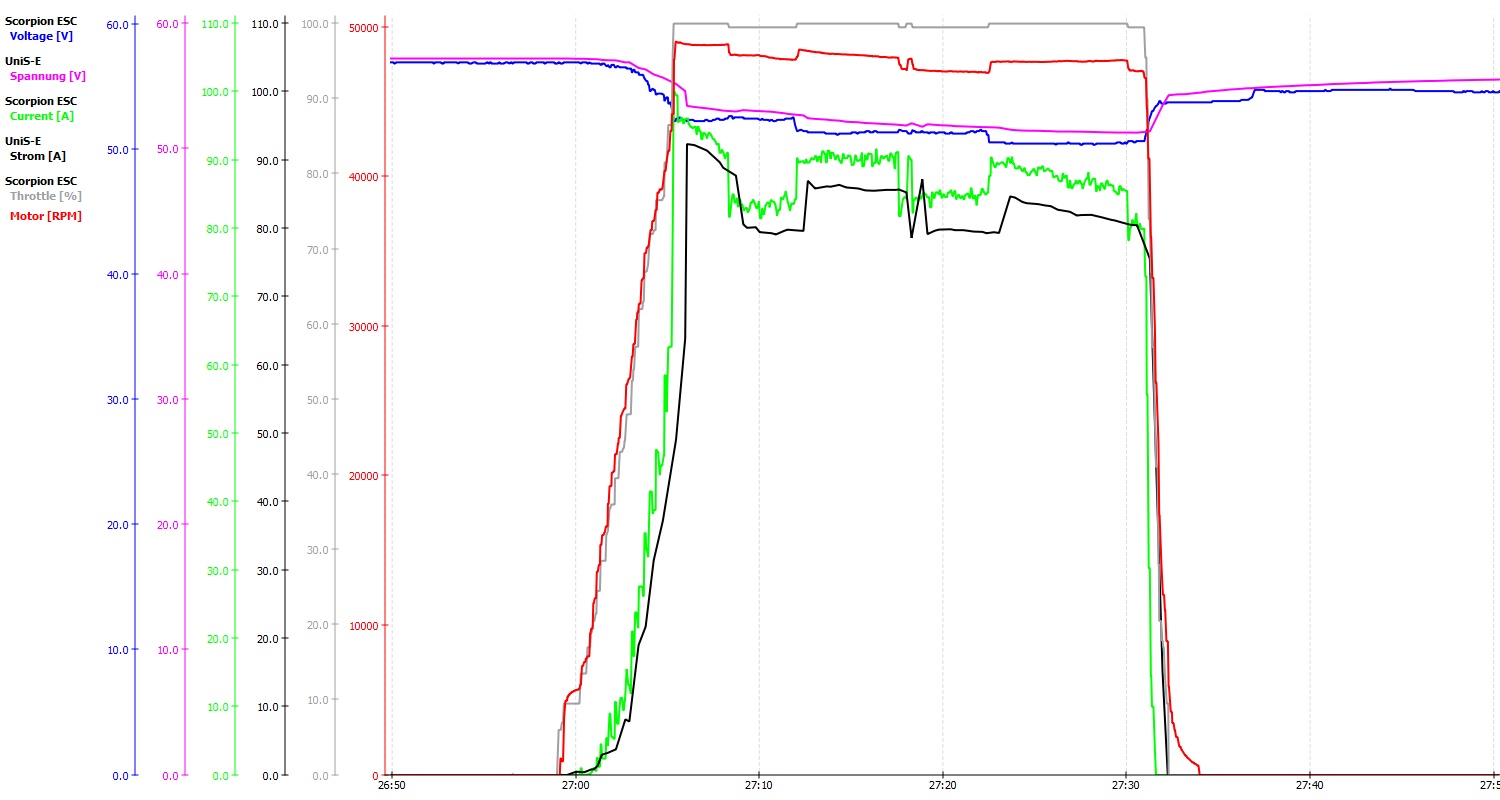
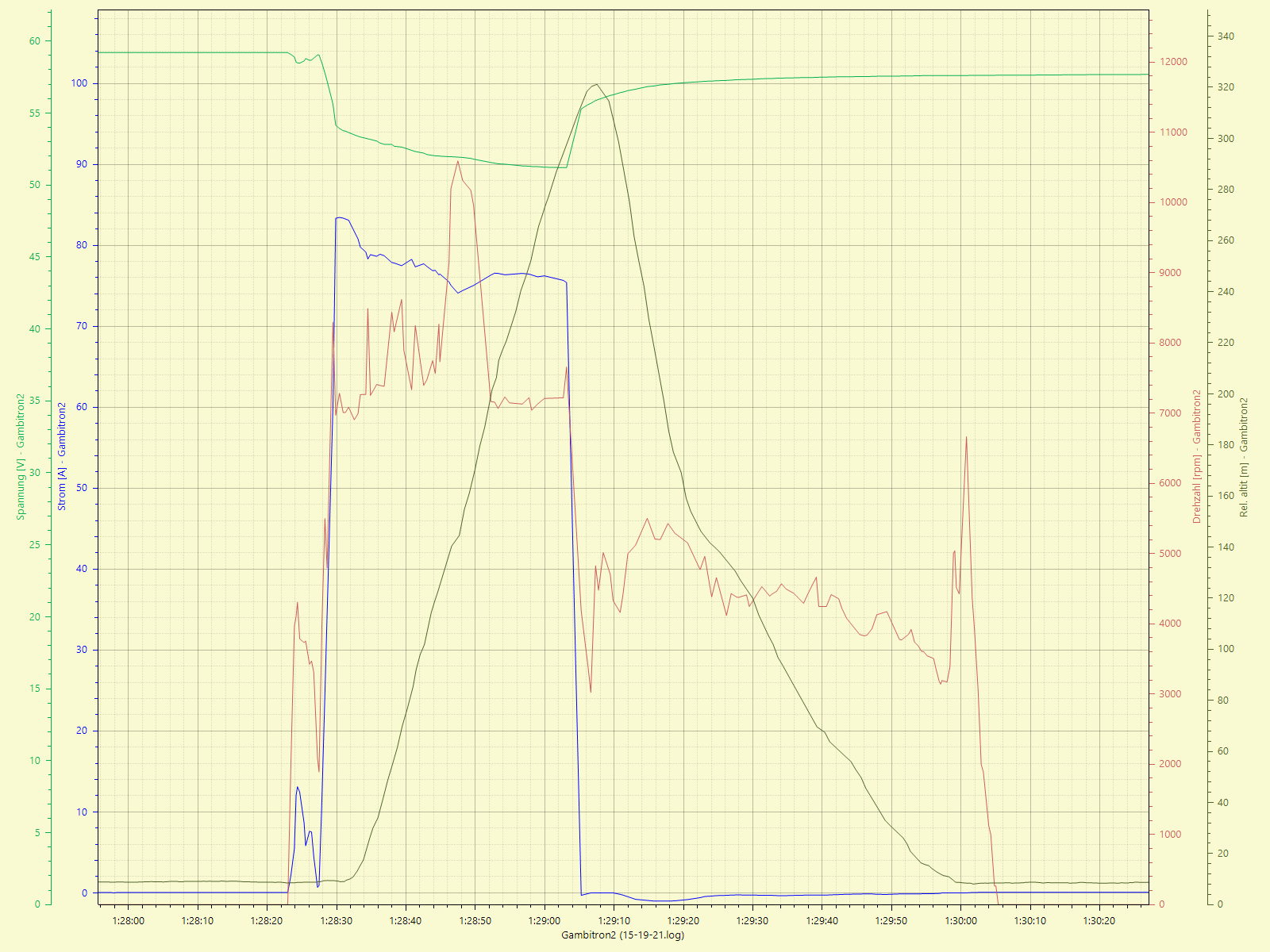
On voit que le Tribunus réagit plus rapidement que l’Unisens-E. Ce dernier lisse les valeurs et réagit avec un retard de 0.7 secondes.
Il y a une également une différence dans les valeurs mesurées. Le Tribunus donne des valeurs plus élevées en courant, l’Unisens-E donne des valeurs plus élevées en tension. Au total, le Tribunus donne des mesures en Wh plus élevées de 3%. Il faut garder à l’esprit que ce ne sont pas des appareils de mesure calibrés. Scorpion revendique une précision de 5% seulement. En conclusion, je dois donc garder l’Unisens-E pour faire des mesures comparatives.
On voit sur le graphique ci-dessus que le Tribunus passe de temps en temps a 99.5% avec un impact significatif sur la conso et régime moteur… Pour éviter ce problème, j’ai réduit légèrement la valeur max du servo des Gaz pendant la procédure de calibration du Tribunus, puis je l’ai remise a 100% ensuite.
En ce qui concerne la vitesse de rotation, la mesure est très précise. Par contre c’est une mesure brute et il faudra diviser la valeur obtenue par la paire de pôles et le rapport du réducteur (7 dans mon cas). Il serait bien que le rapport soit programmable dans le Tribunus.