L’idée est de placer les différents éléments de telle manière que les accus de propulsion soient presque au centre de gravité, qui devrait être situé au niveau de la clef d’aile.
À l’avant, on a les deux accus de réception et le contrôleur moteur. Celui ci est fixé sur une règle de maçon dont les cotés ont été enlevés en biseau pour mieux rentrer au fond du fuseau. Cela fait un beau radiateur. Le collage est effectué au mastic Sicaflex.
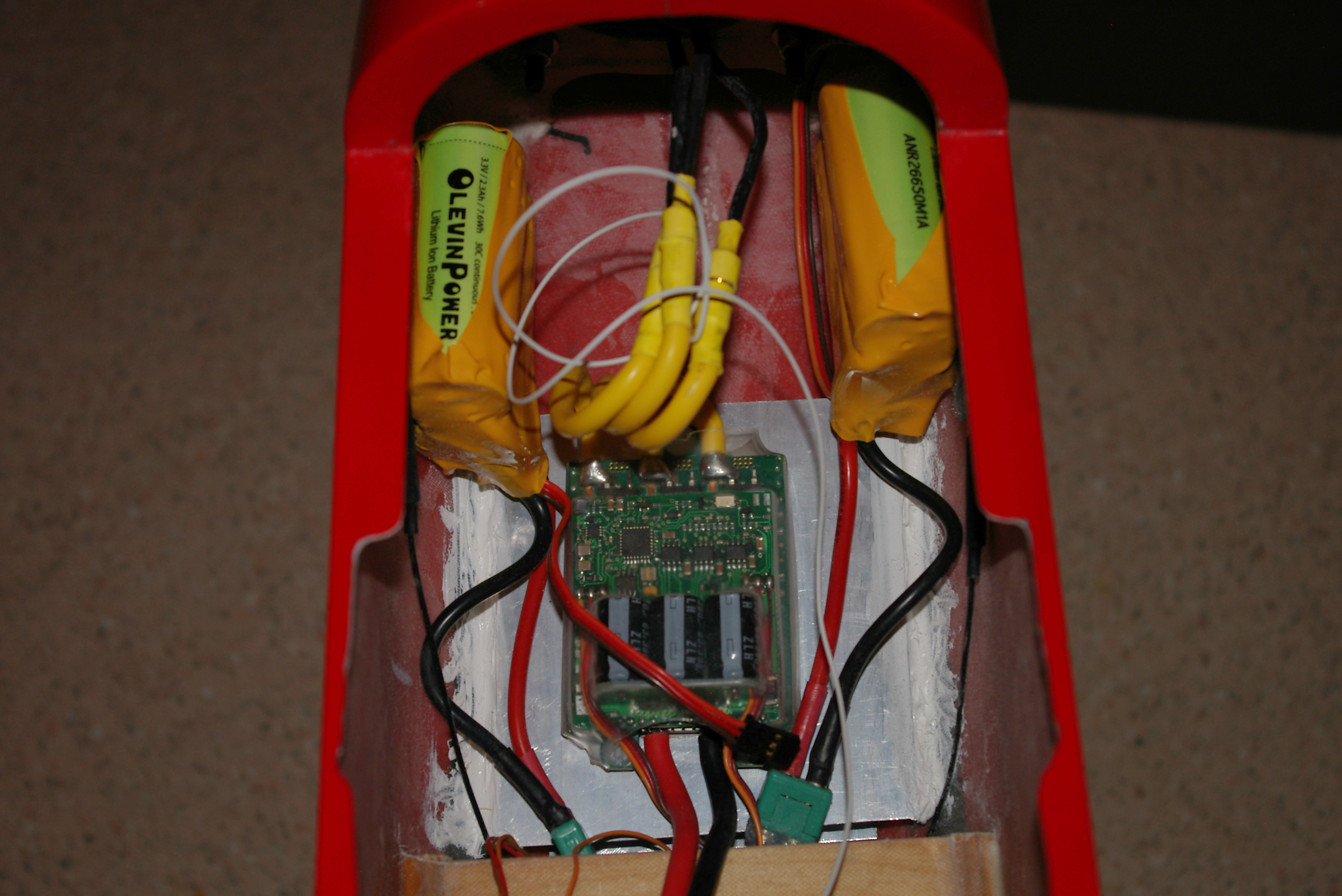
Il y a une entrée d’air via le couple moteur qui est évidé. J’ai également mis une sortie d’air sous le train d’atterrissage. Le contrôleur devrait être bien ventilé.
Juste derrière, il y a le bâti support de l’accu de propulsion qui est constitué de deux tasseaux sur les cotés, une planche à l’avant pour la fixation de l’accu et deux couples pour reprendre les efforts sur le bas du fuseau.
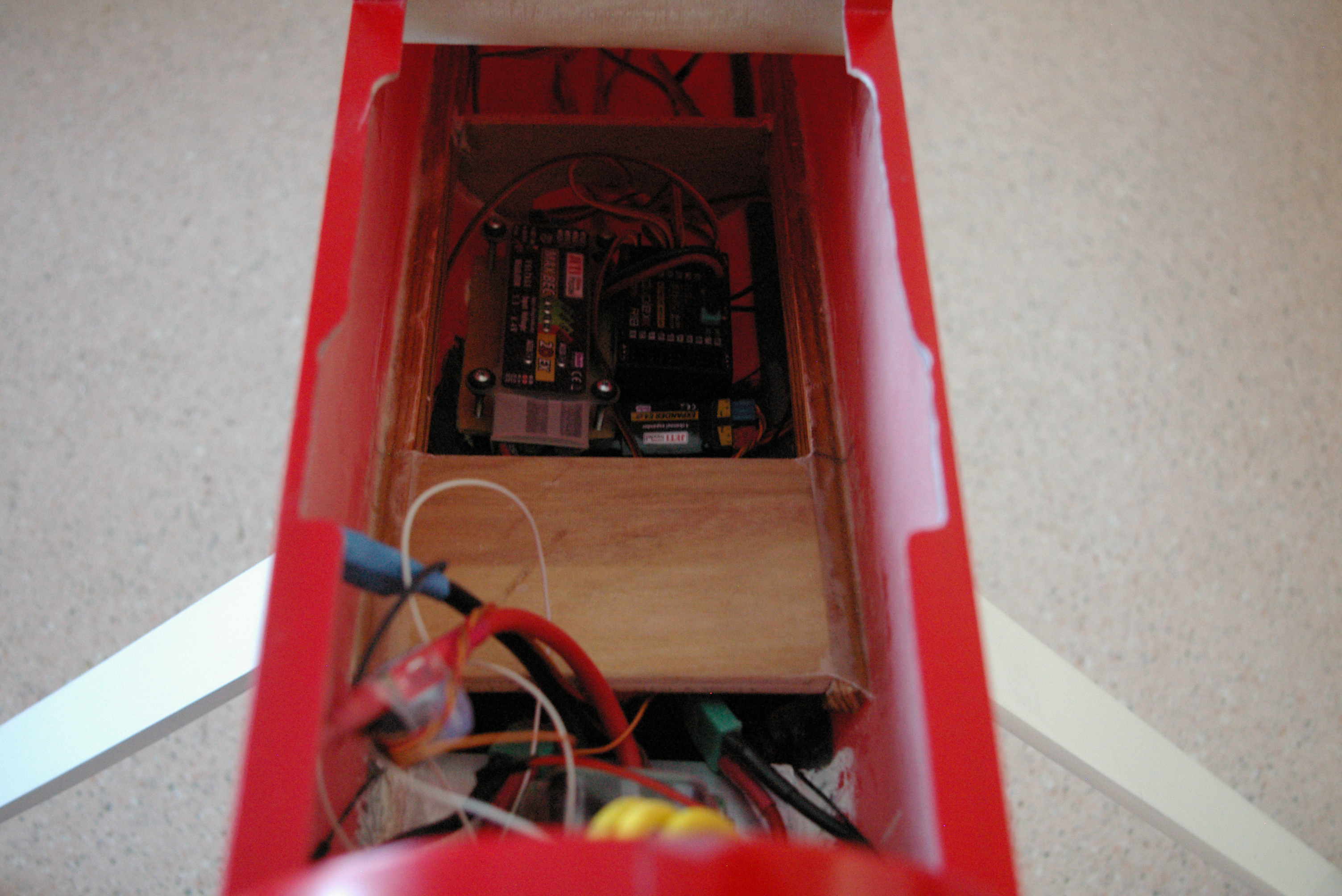
Sous l’accu de propulsion, on trouve la réception avec un récepteur Jeti R18, un MaxBec2D pour la double alim et un expandeur pour la télémétrie. Il y a 2 entrées, le MaxBec2D et la sonde moteur/altimètre.

Un tasseau de bois dur collé en biais donne le positionnement arrière maximum de l’accu.

Le biais permet d’insérer la planche support de l’accu et éviter qu’elle ne bouge en hauteur.

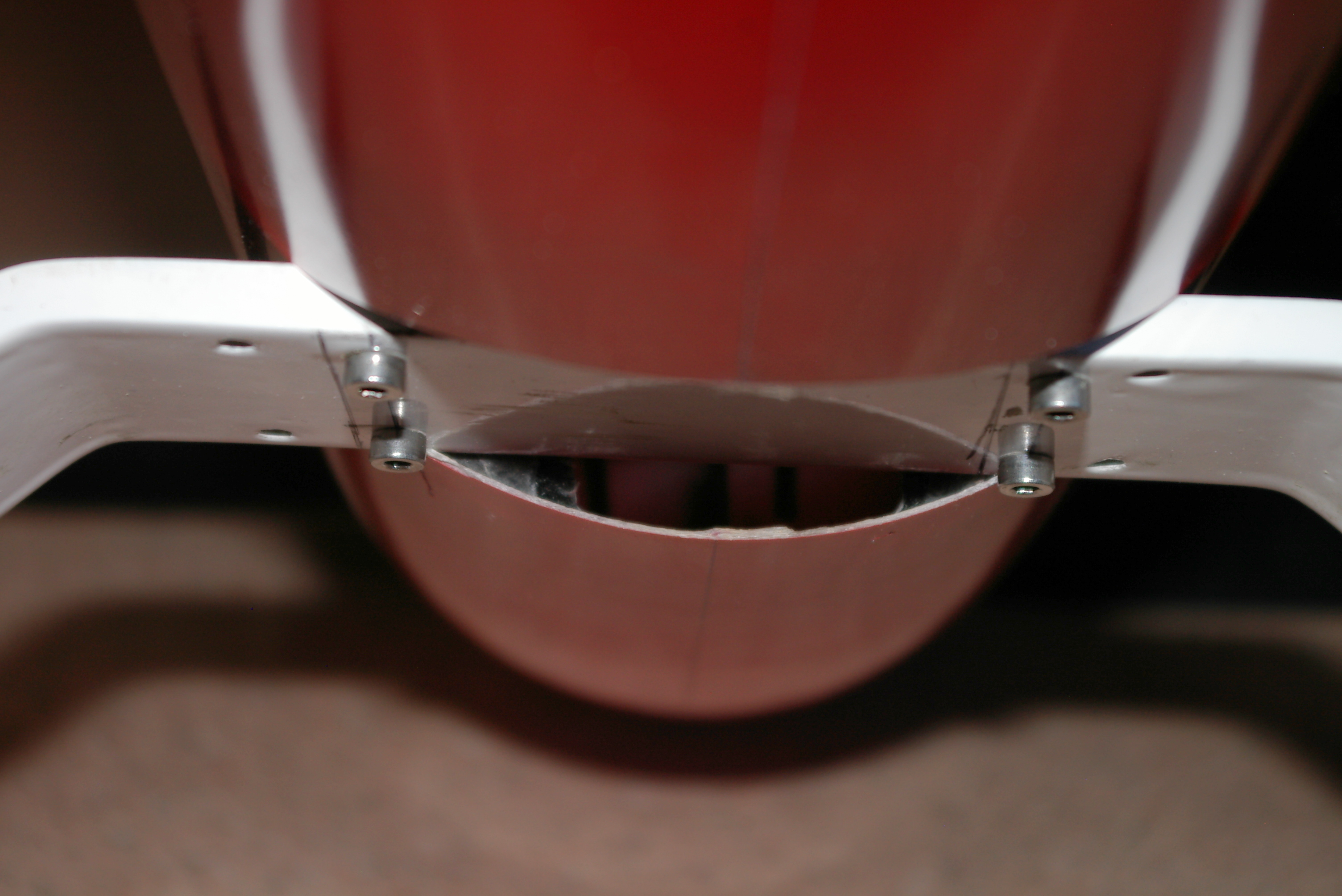
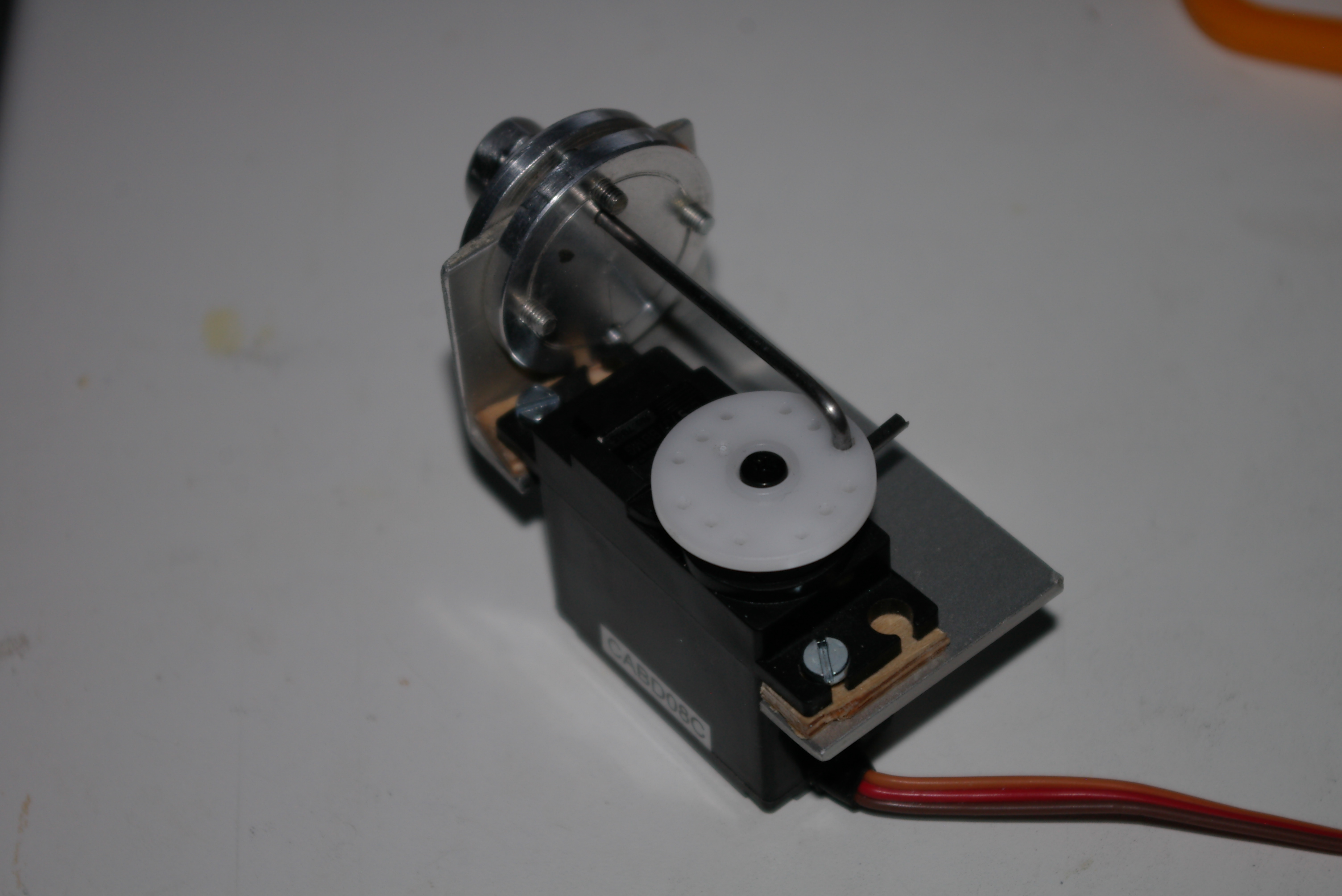
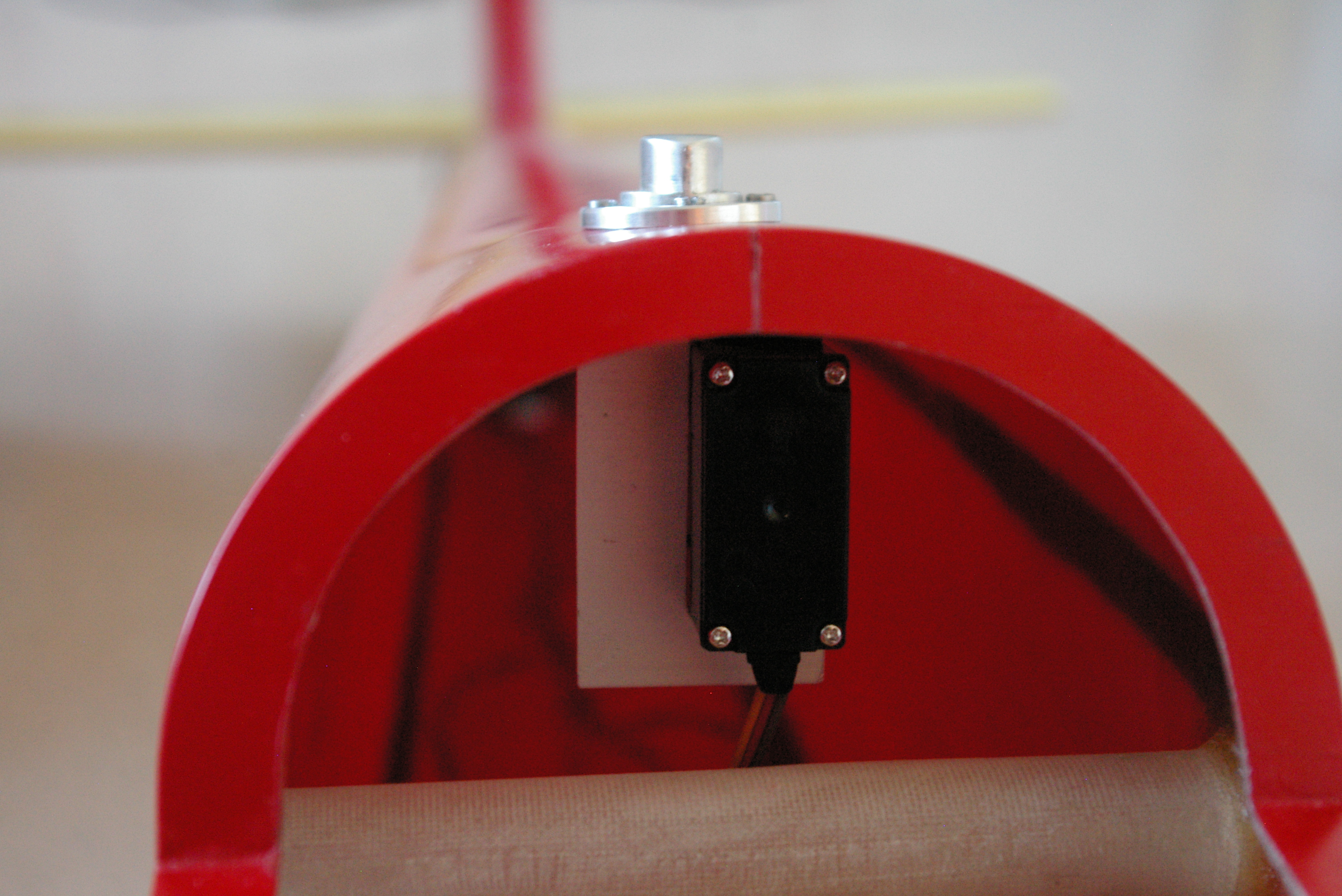
Le crochet de remorquage a été réalisé en alu par Loic. Le but est d’avoir le servo solidaire du crochet pour éviter des problèmes de flexion.


L’intérêt d’un récepteur tel que le R18 est de pouvoir lui associer un satellite. Au total, il y a donc 4 antennes ce qui permet de réduire d’autant les risques de masquage. Le satellite est placé dans la dérive. À noter les antennes qui sont toujours orientées à 90 degrés.
