Conception: Gilles Muller et Loic Provost.

Le Gambitron c’est presque comme le vin, il arrive avec les vendanges. Donc voici la version 2, qui a été conçue en commun avec l’ami Loïc, toujours source de bonnes idées, et qui a la gentillesse de corriger mes erreurs.


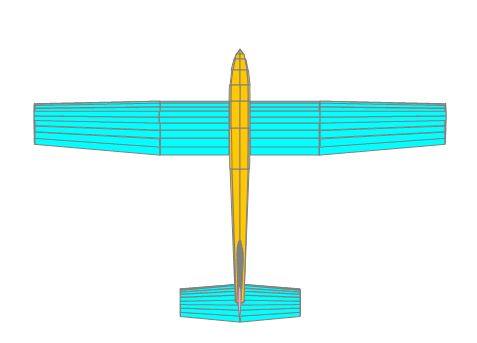
Le but était d’optimiser le poids et la trainée. Le Gambitron V2, c’est principalement un fuselage dessiné autour du pack d’accus. Le profil est un classique Naca 2412. L’envergure est de 2800mm, la corde à l’emplanture est de 390mm, et de 290mm au saumon. La surface des ailes est de 100dm2, la surface du stab est de 21dm2, le bras de levier est de 1300mm. Ces paramètres sont la source de bonnes qualités de vol.
Avec un pack d’accu Zippy 8000ma, le poids en ordre de vol est de 9.8Kg, contre 12Kg pour la V1. 20% de gain, c’est très bien.
Les premiers vols montrent un comportement très sain, le Gambitron V2 est un vrai trainer.
Voici les premières performances sur des montées à 250m:
Planeur F3I 4Kg, Hélice GSonic 22×10, pack Zippy : 0.095 Wh/m
Planeur Schweitzer 5.4Kg, Hélice Gsonic 22×10, pack Graphène : 0.111 Wh/m
Planeur Pégase, 9.6Kg, Hélice Gsonic 22×10, pack Zippy : 0.147 Wh/m
Pour le F3I, les meilleures perfs pour la V1 étaient de 0.108 Wh/m. On a donc un gain d’au moins 10% pour ce planeur. L’hélice GSonic 22×10 est celle qui donne les meilleurs résultats en terme de bilan énergétique.
Motorisation
Le but du Gambitron est de remorquer de manière confortable des planeurs d’une masse autour de 13Kg. Si l’on ajoute une masse de 10Kg pour le remorqueur, et un facteur de 150W par Kg, on obtient autour de 3500W. Les moteurs qui sortent cette puissance pèsent autout d’1 Kg, ce qui est le cas du Scorpion 6530-180, d’un KV réel de 169.

Concernant les accus, les contraintes sont: (i) d’avoir une capacité suffisante pour ne pas changer trop souvent le pack, (ii) d’avoir une très bonne longévité, (iii) garder le prix raisonnable. De fait, il faut éviter de trop tirer en ampérage et essayer de rester dans les 10C. Pour ce faire, je préfère monter en tension, quitte à utiliser un contrôleur plus cher. Mon choix s’est donc porté sur des packs de 14S. Le contrôleur Jet ESC HV 300A, 16S vient d’outre manche, et le patron Bruno Tollot répond rapidement à toutes les questions.

Le frein d’hélice est paramétrable avec plusieurs niveaux de freinage. J’utilise le niveau juste avant le blocage. Plus l’hélice tourne lentement, plus le frein est efficace pendant la descente.
J’ai actuellement deux packs: 8000ma Zippy (2x6S+2S) et 10000ma Graphene (6S+2x4S). Le poids du pack graphène est de 3310g (3.02ma/g), contre 2680g (2.98ma/g) pour le Zippy, soit 630g de plus.

Le graphe ci-dessous, présente un résumé de dix remorquages avec le pack graphène, puis deux remorquages avec le zippy.
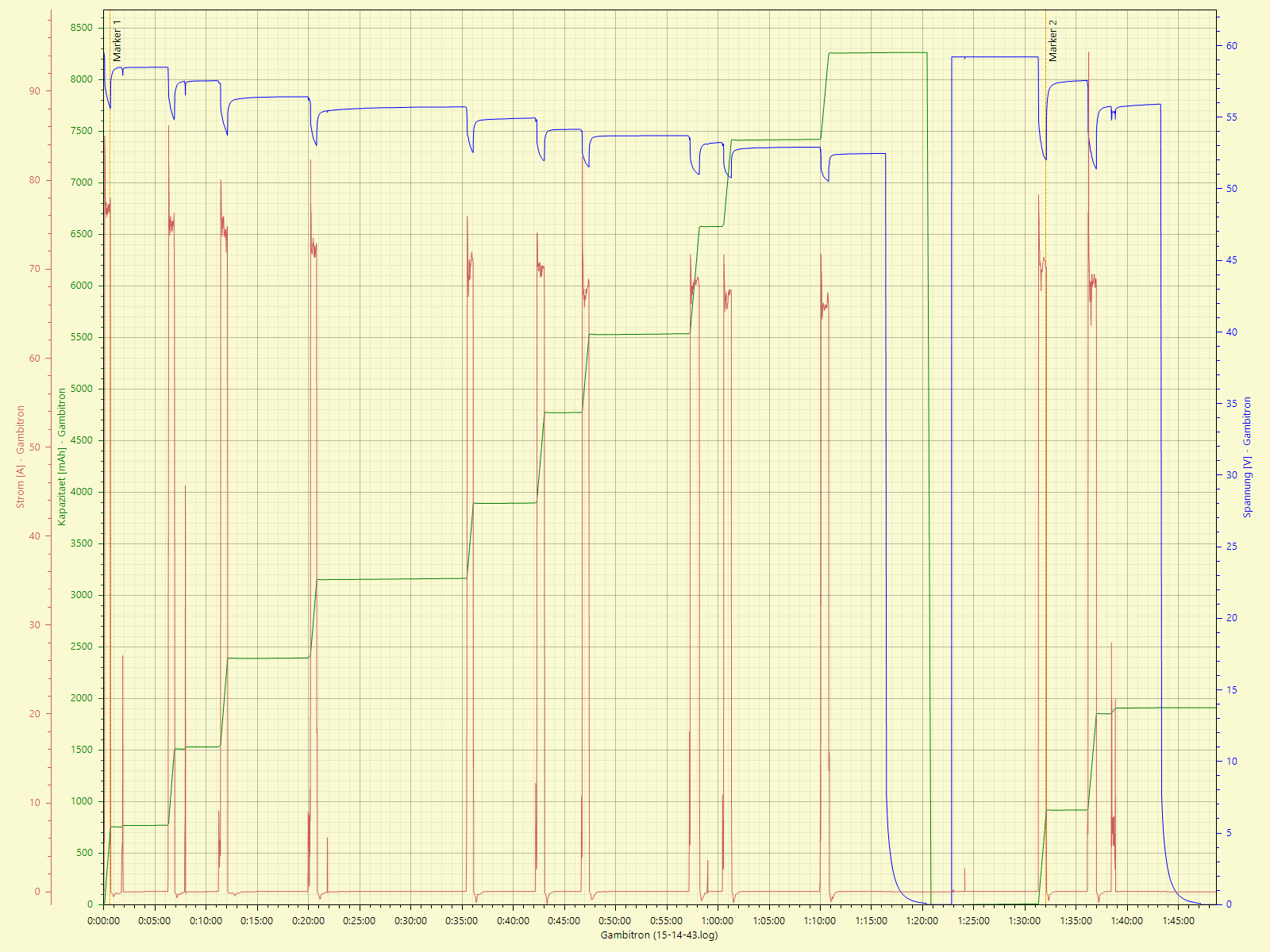
À la fin du premier remorquage, on a 3.5V et 6A de plus pour le pack Graphène. La puissance en début de remorquage est de 4400W et de 3300W en fin. À la fin des dix remorquages, le pack graphène est à peine chaud, alors que le Zippy chauffe légèrement. Par contre, le pack graphène est presque deux fois plus cher que le Zippy. De toute façon, il semble que les Zippy ne soient plus distribués.
Construction
La construction est réalisée avec du CTP léger 3mm en bouleau et du 5mm aviation pour les parties qui nécessitent des renforts. Le fuselage est du type caisse pour des raisons de rapidité de construction. La conception est en CAO 3D et la découpe des pièces a été effectuée à la fraiseuse par l’ami Bruno. L’ami Yannick m’a fourni les matériaux de construction.
Fuselage
Le Gabitron V2 est construit avec le but de simplifier la gestion des accus. Le moteur est toujours le Scorpion 6530-180 monté sur la cloison pare-feu via une croix en alu. À l’avant, on trouve donc un grand compartiment pour les accus, au dessus d’un logement pour le contrôleur. L’équipement de la V2 est le même que celui de la V1. On trouve le contrôleur AlienPower et un UniSens-E pour la mesure par télémétrie de l’altitude et des paramètres de consommation. J’ai également mis deux sondes de température autour de la partie fixe de la cage du moteur, et du contrôleur.

Derrière le compartiment accus, il y a le compartiment servos et réception. Les accus (LIFE 1000ma) de réception sont doublés. La régulation est réalisée par un MAXBEC 2D qui retransmet par télémétrie la tension réelle des accus. Il y a deux servos de direction, un pour la dérive, un pour la roulette de queue, un servo pour la profondeur, et enfin la commande de remorquage avec un très joli crochet de remorquage réalisé par Loïc.

Les commandes sont réalisées avec des tiges en fibre de verre insérées dans des tubes laitons aux extrémités.

Les flancs sont un peu trop longs pour la fraiseuse. La solution a été de couper en trois parties et de réaliser des entures pour les raccords.

La réception est doublée avec un satellite qui est fixé sous la dérive. Les antennes sont glissées dans des gaines pour qu’elles ne bougent pas.

La commande de la profondeur est réalisée avec une chape à boule qu’il faut dé-clipser pour le démontage.

Il y a trois capots pour le dessus. Les capots sont réalisés en polystyrène découpé au fil chaud, puis coffrés au balsa avec un tissu de fibre 50g. Le capot arrière est collé à demeure. Le capot du compartiment servo est fixé avec deux vis et deux tétons.

Le capot des accus est fixé par deux tétons et un verrou de verrière.

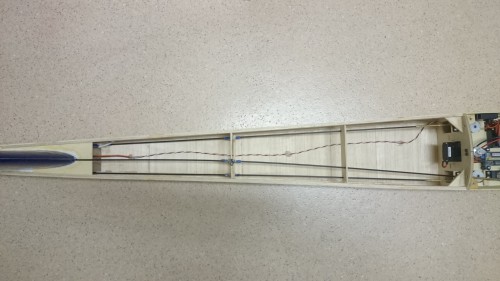
Les accus de propulsion sont montés sur une plaquette de CTP 2mm par du scratch. La plaquette vient se coincer sous une plaquette montée inclinée à l’arrière, et est fixée à l’avant par une vis. Le montage/démontage de l’accu est très rapide. Le centrage est toujours nickel et il est facilement réglable en déplaçant les accus sur le scratch.


Pour éviter les câbles qui se baladent, j’ai fait réaliser des circuits imprimés avec trous métallisés. En empilant deux circuits, on a une base assez solide pour souder les connecteurs. J’ai ensuite vissé les plaquettes sur le fond du fuselage.
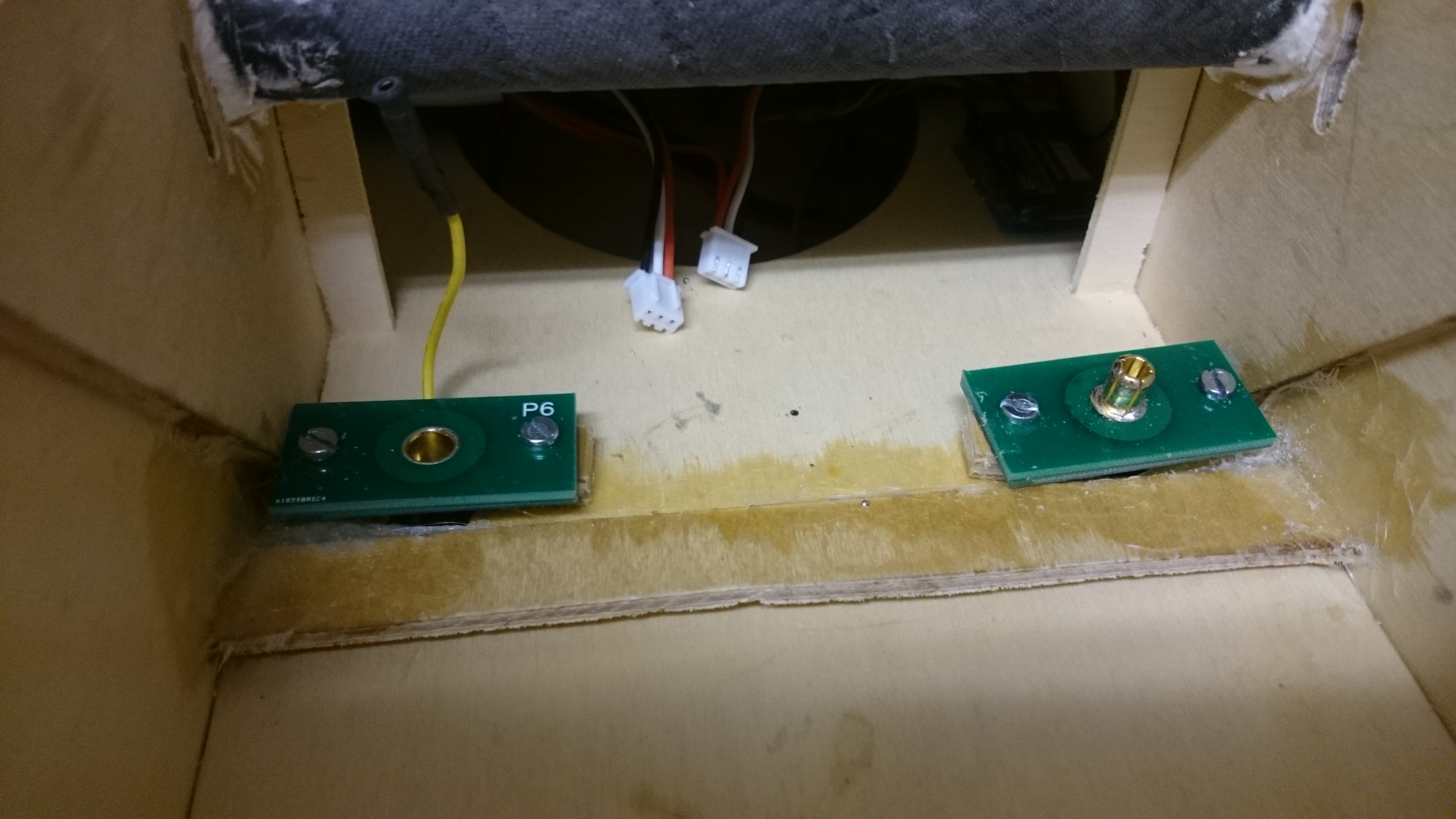
On voit les fils de recharge des accus de réception.
Capot moteur
Le capot moteur est réalisé en fibre dans un moule qui est lui-même obtenu à partir d’une forme imprimée en 3D (merci à Olivier Ségouin). La forme est ensuite apprêtée et poncée.
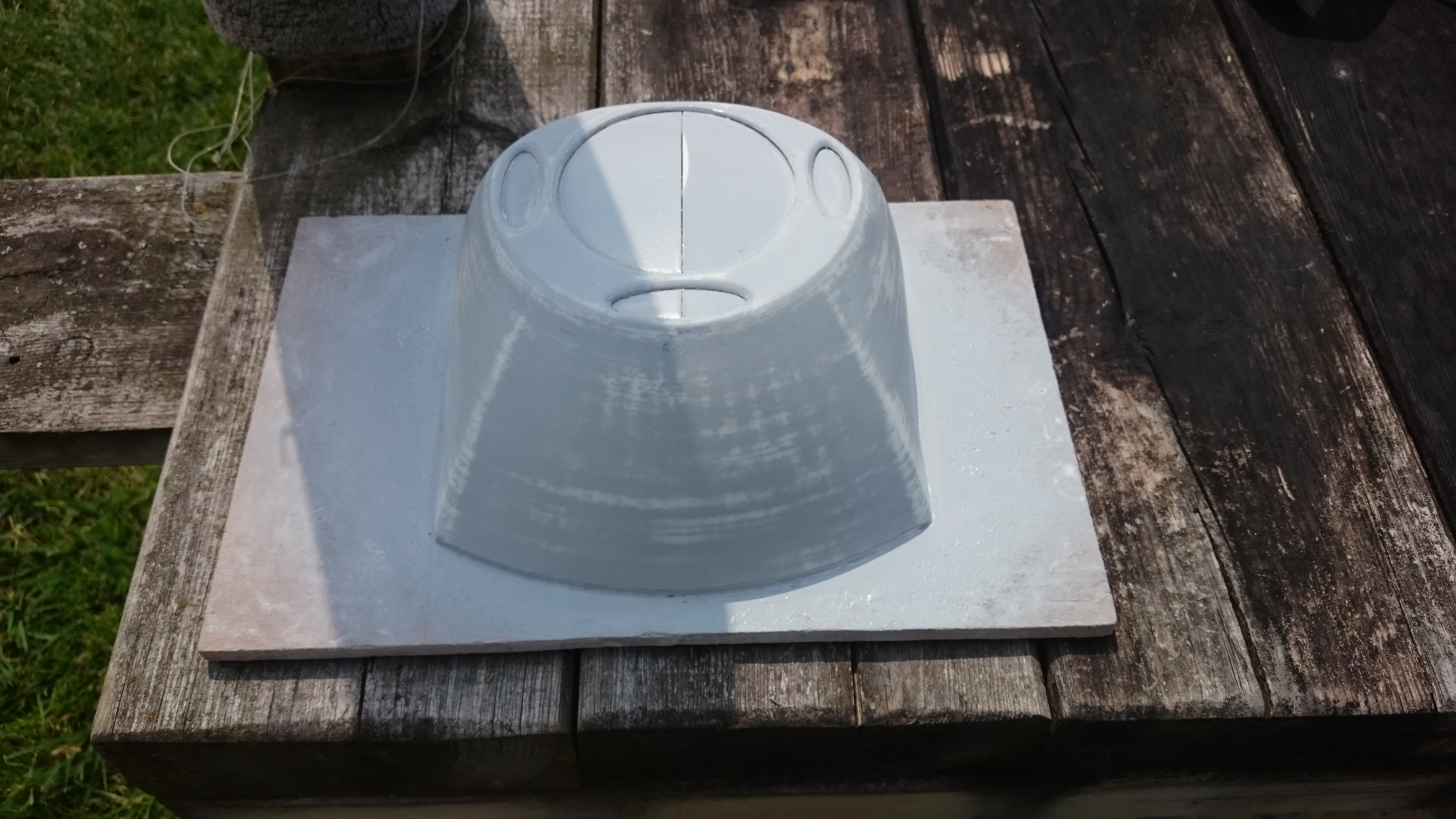
Le capot est fixé sur le bâti moteur via 4 vis. Les écrous sont réalisés avec du micro ballon.


Entoilage
L’entoilage est fait à l’oracover rouge.

Cela rajoute 150g au poids du fuseau.
Le Gambi était le cheval du grand-père de Loic. De fait, un cheval ailé semble approprié comme logo.


Ailes
Les ailes sont réalisées en polystyrène coffré en fil chaud. La peau est réalisée à partir d’un sandwich Airex et deux couches de fibre 50g à l’extérieur et l’intérieur. 
Après coffrage, l’aile est évidée ce qui permet de gagner 100g. Pour le guidage du fil, j’utilise deux nervures ajourées pour l’emplanture et le saumon.
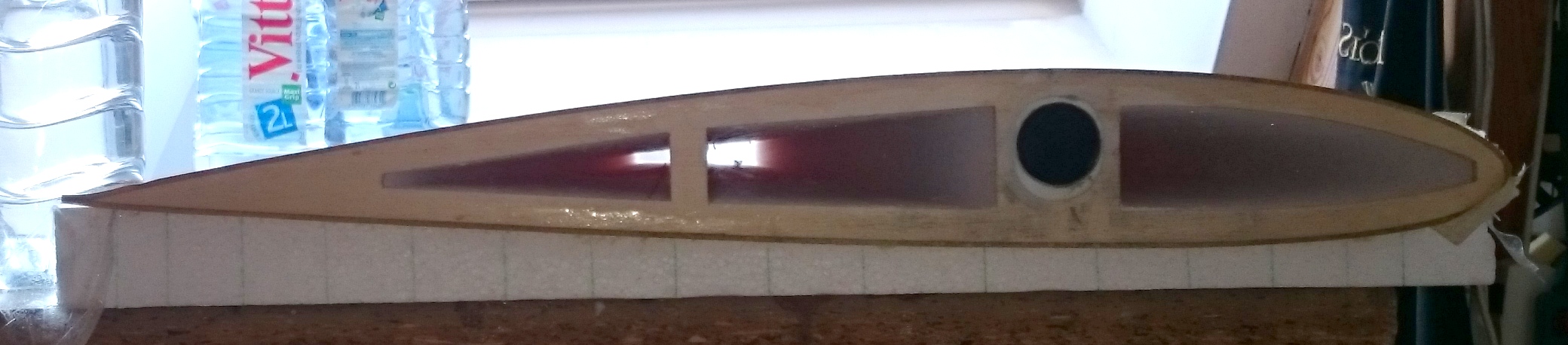

Pour finir, les ailerons sont découpés, puis articulés au silicone.
Bilan de poids
| Item | Poids (g) |
|---|---|
| Ailes | 1 756 |
| Stabilisateur | 378 |
| Hélice GSonic 22×10 | 165 |
| Train avec roues | 753 |
| Capot accus | 50 |
| Capot servo | 40 |
| Capot moteur | 51 |
| Clef d’aile | 300 |
| Moteur Scorpion | 1 050 |
| 2 x Accus de réception LIFE 1100ma 2S | 132 |
| Électronique de réception | 145 |
| 6 servos | 325 |
| Controleur Alien | 300 |
| Roulette de queue | 44 |
| Fuselage entoilé avec accastillage | 1670 |
| Accus de propulsion Zippy 8000ma 14S | 2 680 |
| Total | 9840 |